Tweco HMC-410 Robotic Interface Kit User Manual
Page 23
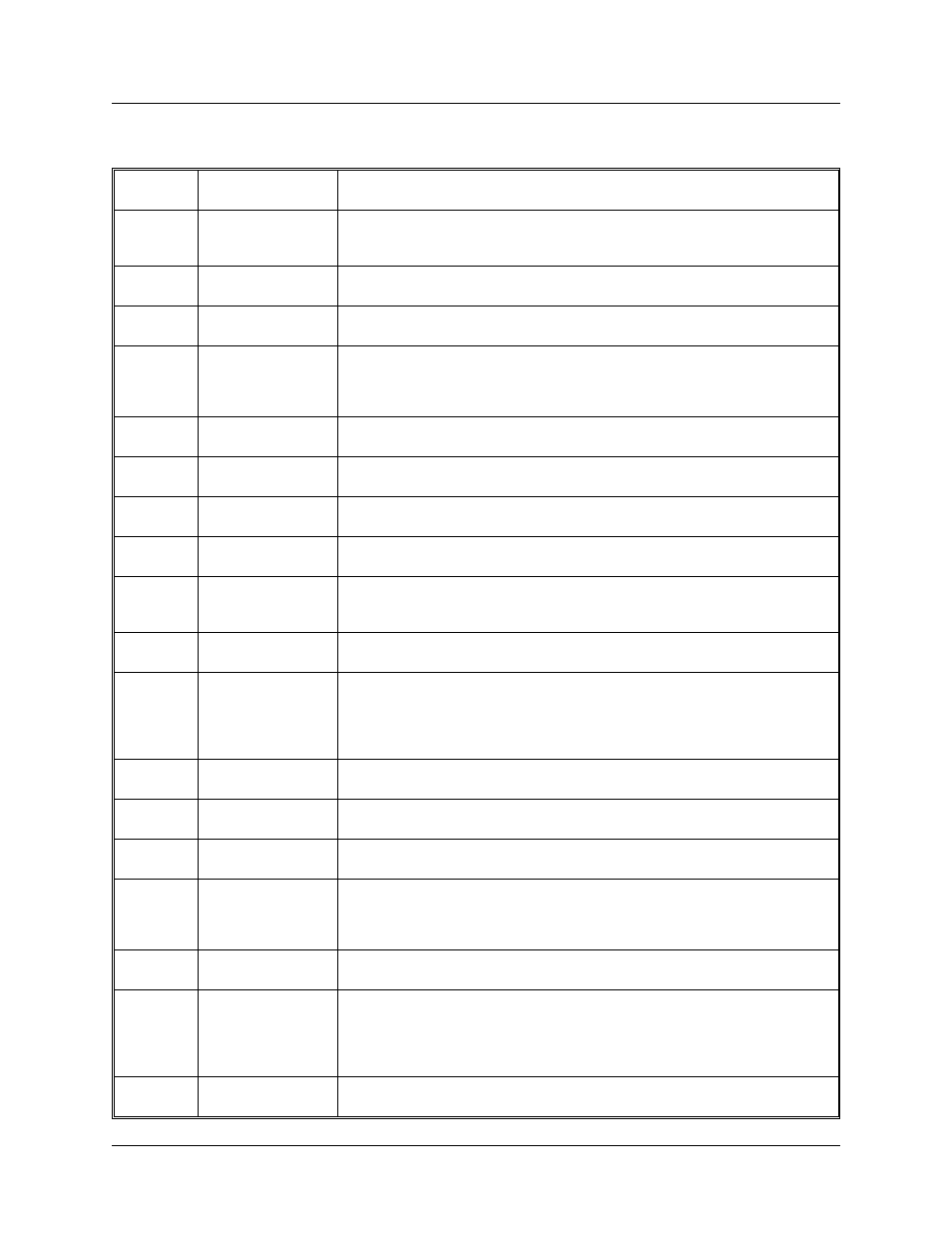
3 (Comau): This mode selects the Comau control. When used with the 37 Pin Amphenol Board (870244),
the following signals on the Comau Harting Connector interface are supported:
Pin
Name
Description
D11
WFS +
This line is a 0 to 10 VDC analog signal, which corresponds to a 0 to 888
inches / minute wire feed speed.
D12
WFS -
Analog return
D13
Shield
D14
VOLT +
This line is a 0 to 10 VDC analog signal, which corresponds to a 0 to
44.0 volts arc voltage (or pulse frequency reference, sometimes called
trim, setting).
D15
VOLT -
Analog return
D16
Shield
D8
D10
A6
Arc On +
Input to the robot designating an arc established condition. These 2
lines are shorted together when there is a arc established.
C5
Arc On -
See Arc On +
A9
Arc Start +
Output from the robot commanding a weld on condition. These 2 lines
are shorted together by the robot to command the HMC-410 to start a
weld. When the contacts are opened, the HMC-410 stops the current
weld.
C16
Arc Start -
See Arc Start +
B9
C9
D1
+ AW
Input to the robot used to sense a wire stuck to the work. When these 2
lines are shorted together, the robot knows that there is a wire stuck to
the work.
D3
- AW
See + AW
A15
Air Blowing +
Output from the robot commanding a purge of shielding gas. These 2
lines are shorted together by the robot to command the HMC-410 to
purge the shielding gas. When the contacts are opened, the HMC-410
stops purging shielding gas.
B15
Air Blowing -
See Air Blowing +
430429-457
June 13, 2002
2-17