Tweco HMC-410 Robotic Interface Kit User Manual
Page 22
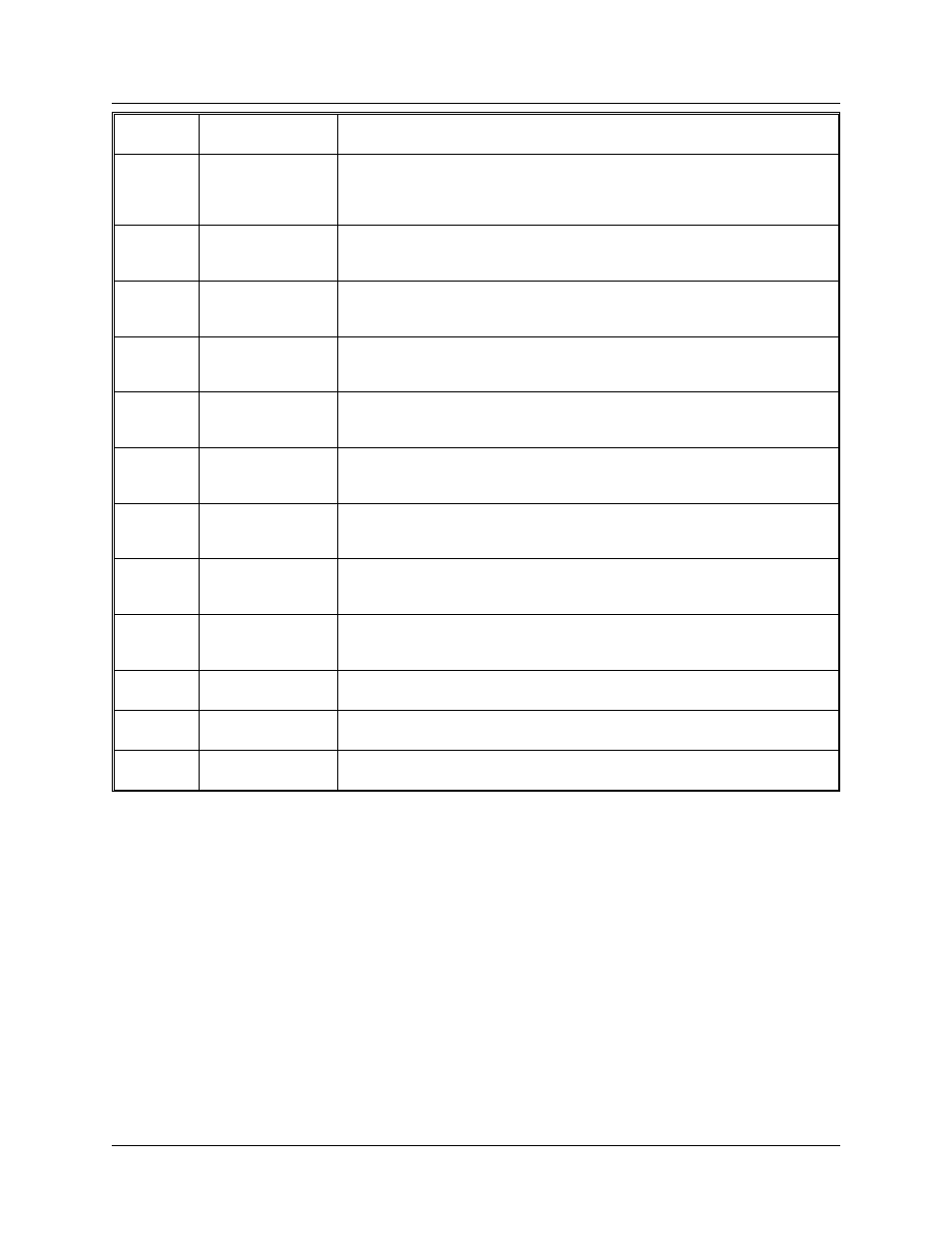
Pin
Name
Description
d
Arc Detect Input
When the HMC-410 shorts this line to 0 VDC Common, there is an arc
established by the welder. This control may also be activated if it’s run-
ning in the dry run test mode.
e
Gas Shortage
Input
When this line is shorted to 0 VDC Common, there is an absence of ad-
equate shielding gas.
f
Wire Shortage
Input
When this line is shorted to 0 VDC Common, there is an shortage of
welding wire.
g
Water Shortage
Input
When this line is shorted to 0 VDC Common, there is an absence of ad-
equate water.
h
Power Supply
Fail Input
When this line is shorted to 0 VDC Common, the welder is in a failed
state.
j
Spare 24 VDC
Input
k
Spare 24 VDC
Input
m
0 VDC Signal
Common
Robot Common
n
0 VDC Signal
Common
Robot Common
p
Unused
r
+24 VDC
Robot +24 VDC
s
Shield
Cable Shield Ground
This mode effectively has the HMC-410 run as the master weld control. The robot controls the welder with a
master Weld On/Off control. The HMC-410 can control the welding parameters of wire feed speed and arc
voltage / pulse frequency for the whole weld, or for some parts of the weld. For example, the HMC-410
could control the run-in speed and voltage, a 1/2 second start level, then use the settings from the robot for
the ‘main weld’. Once the master weld signal transitions to the off setting, the HMC-410 could then control
the craterfill setting, burnback, and gas postflow. All these various parameters would be controlled without
oversight from the robot control. Some of these items can be performed somewhat more quickly locally (on
the HMC-410), and thus may provide a slightly higher level of control.
In order to configure the HMC-410 for this mode, program the various segments of the weld on the
HMC-410 screens. For example, for a .2 second preflow set the time setting in the preflow setting to 0.2.
In order to program voltages or wire feed speed locally on the HMC-410, set the desired value in the appro-
priate window (voltage / pulse frequency in the center window; or wire feed speed in the bottom window) for
each phase of the weld.
In order to utilize the robot controlled settings, set the wire feed speed and/or voltage setting to EEE. This
will configure the HMC-410 to use the robot setting for that phase of the weld. The preset settings will be
displayed on the voltage and wire feed speed displays when the unit is run in its dry run test mode.
430429-457
2-16
June 13, 2002