Operation – Tweco HMC-410 Robotic Interface Kit User Manual
Page 16
The inputs can accept inputs from 5 to 24 Volts, AC or DC.
Operation
The kit uses 2 soft-switches for robotic mode selection (ROB) and wire stick check enable (ELS). The ROB
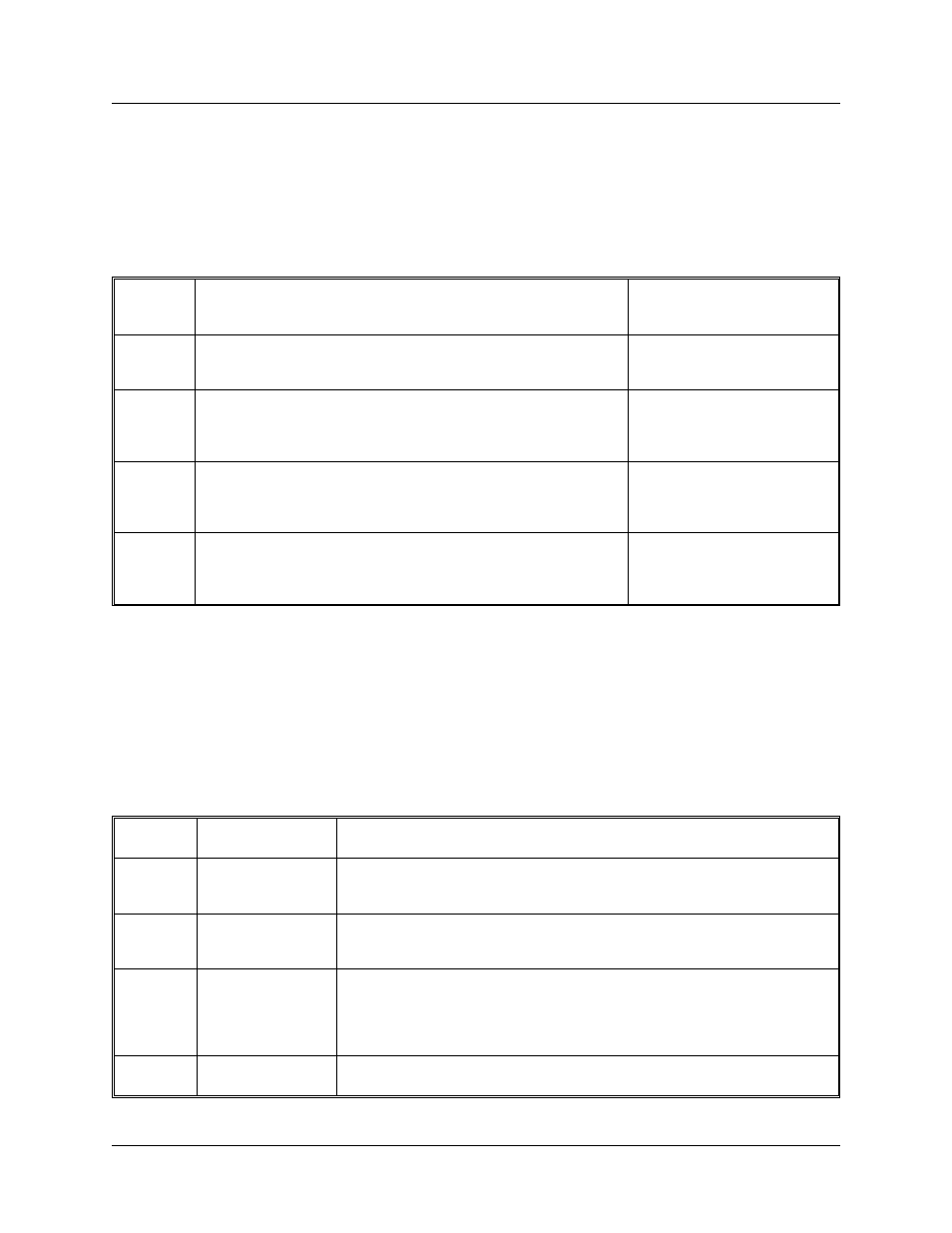
soft-switch dictates the operational characteristics of the system and thus is fairly involved. The following
chart can be used to help identify which mode is required for a particular setup.
Robot
Configuration
Recommended HMC-410
Robotic Mode
ABB
Direct Control of Wire, Voltage, and Gas
1 (or 4 for 1V in is 5 Arc
Volts, 100 IPM Scale)
ABB
Master Weld On/Off style control. Welder controls things like
preflow, burnback, and postflow times and some or all wire
feed speed and arc voltage settings.
2 (or 5 for 1V in is 5 Arc
Volts, 100 IPM Scale)
Fanuc
Master Weld On/Off style control. Welder controls things like
preflow, burnback, and postflow times and some or all wire
feed speed and arc voltage settings.
3
Comau
Master Weld On/Off style control. Welder controls things like
preflow, burnback and postflow times and some or all wire
feed speed and arc voltage settings.
3
Details on these different modes are provided in the appropriate section under the Robotic Mode Selection
softswitch section for each ‘mode’.
Robotic Mode Selection (ROB):
This soft-switch selects if the robotic mode is being used, and if it is what mode is selected. The following
modes are supported:
OFF: Operates as standard 410, robotic interface is disabled.
1 (and 4): This mode selects the ABB direct control. When used with the 24 Pin Amphenol Board (870213),
the following signals are supported:
Pin
Name
Description
A
Water / Gas
Error
A loss of adequate water (cooling) or shielding gas is designated when
this line is shorted to pin J.
B
Arc
Established
The welder supplies +24 VDC with respect to pin J when an arc is estab-
lished.
C
Inch Reverse
When the robot control puts +24 VDC on this line with respect to pin J,
the HMC-410 will run the wire in reverse at the speed set in the INCH
SPEED window on the HMC-410. If EEE is selected for INCH SPEED,
the speed will be set by the voltage on pins W and X.
D
+24 VDC
Robot +24 VDC
430429-457
2-10
November 2, 1998