Tweco HMC-410 Robotic Interface Kit User Manual
Page 15
Input Common: JP1
Source (Position 1,2): Current Sourcing (PNP) Outputs from Robot (Default - ABB)
Sink (Position 2,3): Current Sinking (NPN) Outputs from Robot
The inputs can accept inputs from 5 to 24 Volts, AC or DC.
Output Common: JP2
Source (Position 1,2): Current Sourcing (PNP) Outputs to Robot (Default - ABB)
Sink (Position 2,3): Current Sinking (NPN) Outputs to Robot
The outputs can sink or source up to 200mA / 60 Volts max.
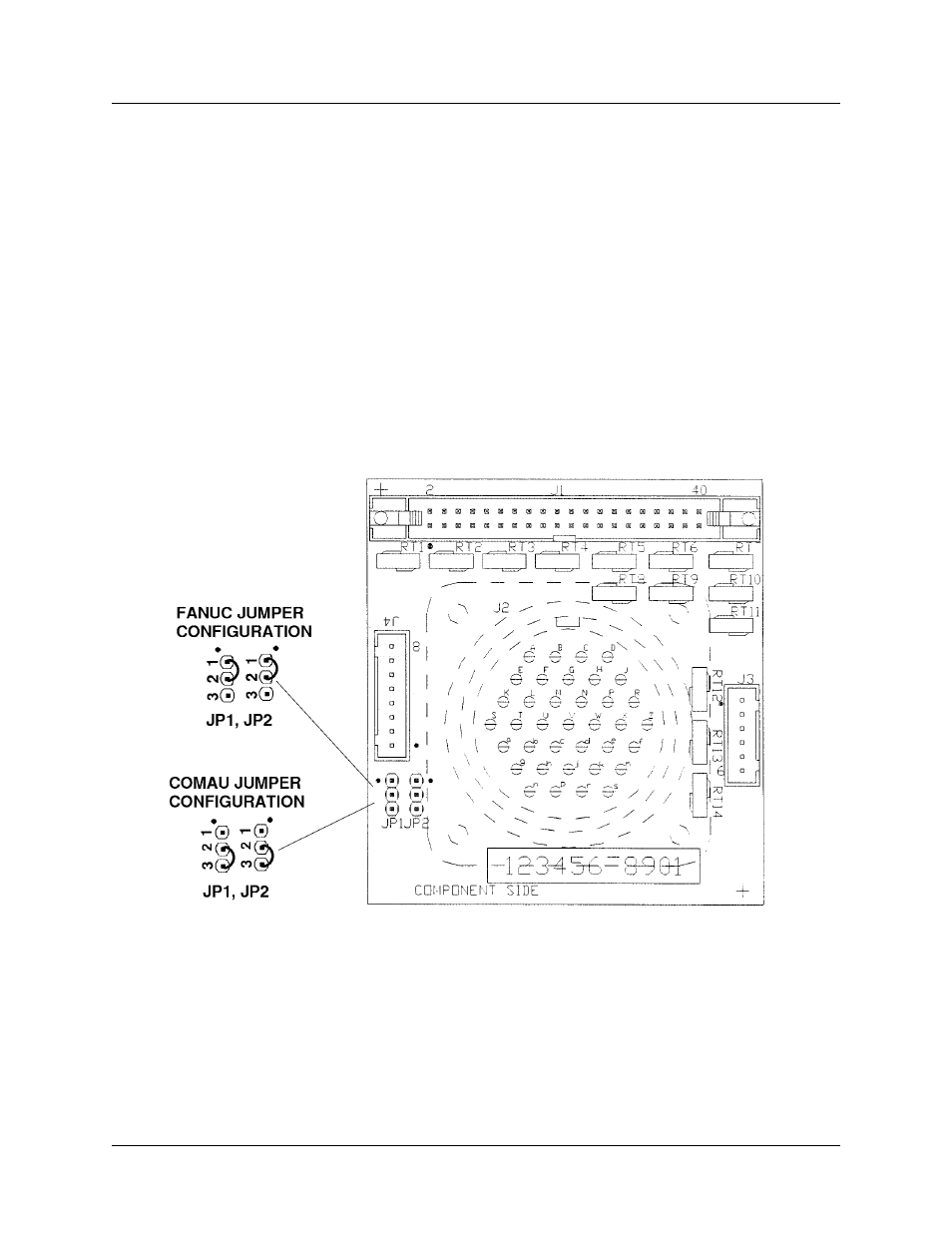
870244 37 Position Board (Supplied with 870236-2 Fanuc and 870236-3 Comau Kit)
These boards should be configured to operate with the Fanuc robots as shipped. Should an alternate ar-
rangement be required, consult the following for details.
Output Common: JP1
Sink (Position 1,2): Current Sinking (NPN) Outputs to Robot (Default - Fanuc)
Source (Position 2,3): Current Sourcing (PNP) Outputs to Robot (Comau)
The outputs can sink or source up to 200mA / 60 Volts max.
Input Common: JP2
Sink (Position 1,2): Current Sinking (NPN) Outputs from Robot (Default - Fanuc)
Source (Position 2,3): Current Sourcing (PNP) Outputs from Robot (Comau)
430429-457
June 13, 2002
2-9
Figure 4 870244 37 Pin Amphenol Board