Chapter 6 power sensors, Accuracy, Sensor uncertainty – Bird Technologies VPM3 User Manual
Page 51
43
Chapter 6
Power Sensors
Accuracy
The Bird power sensors are highly accurate. Accuracy is specified for each sensor
type is typically given as a percent of reading or of full-scale.
Example - If a sensor has a specified accuracy of 5% of reading +
1.0 uW, then for a 10 mW signal the uncertainty is ± 0.501 mW. For
a 1 mW signal the measurement uncertainty is ±
0.051 mW.
Sensor Uncertainty
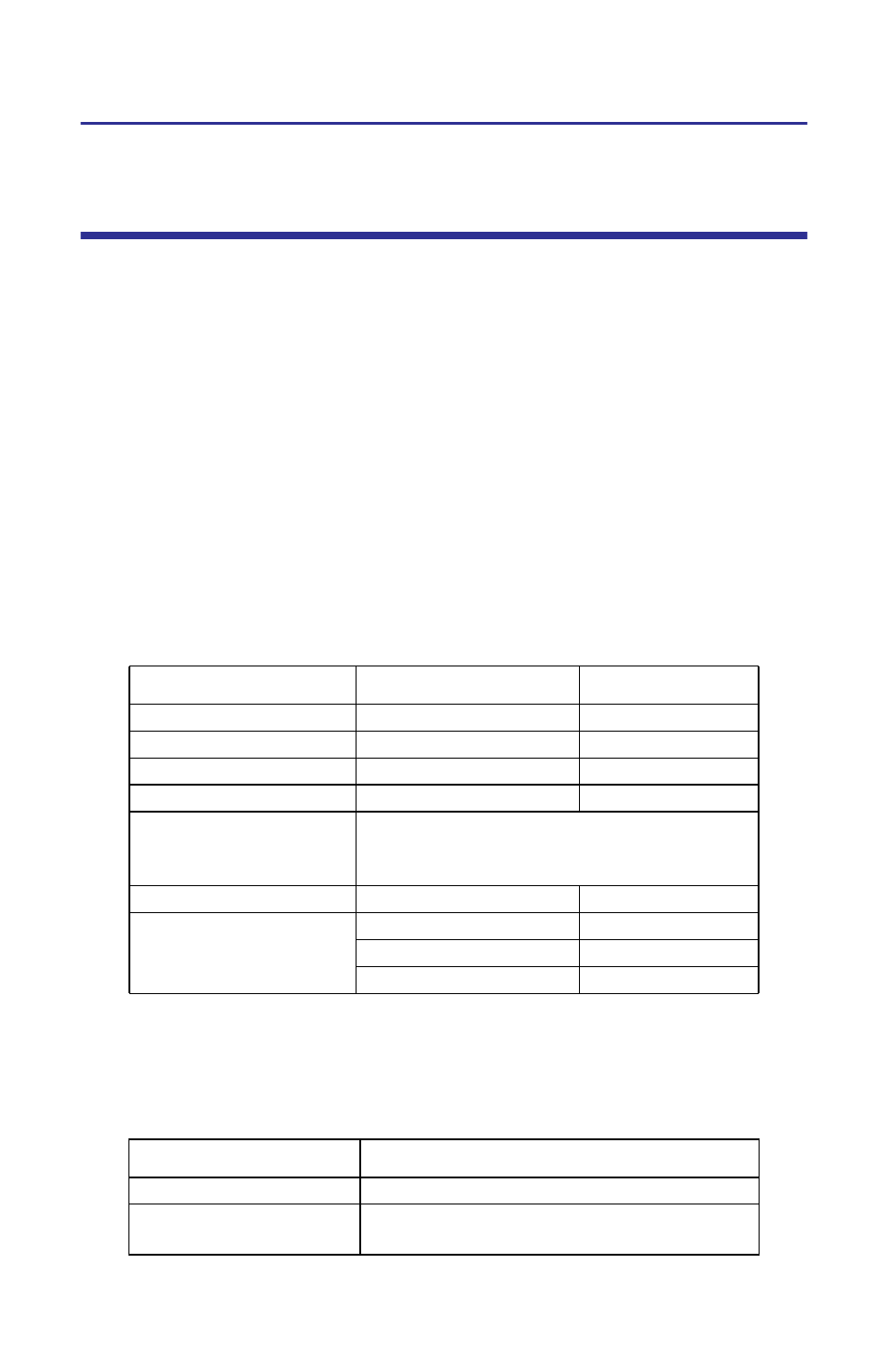
While this value is a good estimate, the sensor is actually more accurate. The
sensor’s accuracy also depends on the temperature, and the power and fre-
quency of the source; Table
1 lists some examples of uncertainty factors. If an
uncertainty is given as a power, divide this value by the measured RF power and
convert to a percentage. For example, an uncertainty of ±
0.25 μW with a RF
power of 10 μW is a 2.5% uncertainty. Table
2 lists external factors, such as
using attenuators or using a cable to connect a sensor to the transmitter, which
could affect the measurement uncertainty.
Table 1 - Example Uncertainty Factors
Error Source
Conditions
Uncertainty
Calibration Uncertainty
± 1.13%
Frequency Response
40 MHz to 4 GHz
± 3.42%
Temperature Linearity
–10 to +50 °C
± 3.43%
Other
*
*. Above 40 °C, when making measurements at frequencies
between 40 and 100 MHz, add 1.1%.
< 40 °C or > 100 MHz
± 0.50%
Resolution
± ½ smallest displayed digit
(e.g. for a mW scale, three decimal places
are displayed. ½ the smallest is 0.5 μW)
Zero Set
†
± 0.125 μW
Noise
†
†. After a 5 minute warm-up, measured over a 5 minute
interval and 2 standard deviations
above 1.05 mW
± 0.7 μW
105 μW to 1.05 mW
± 0.4 μW
below 105 μW
± 0.2 μW
Table 2 - External Factors
Error Source
Conditions
Attenuator Uncertainty
Frequency dependent
Cable Uncertainty
Frequency and length dependent (±
5% at
1 GHz for a ‘reasonable’ 1.5 m cable)