1 wiring the external control inputs and outputs, 2 wiring the output power to the motor – Rockwell Automation TD200 AC Drive V1.0, 0.3-20V RMS, 3-Ph, 63A User Manual
Page 20
4-2
TD200 AC Drive Installation and Operation
4.1
Wiring the External Control Inputs and Outputs
Table 4.1 describes the external control circuits shown in figure 4.1. All control circuits
should be wired as follows:
•
use 12 to 18 AWG wire terminated with ring lugs sized for a #8 stud.
•
torque all connections between 11 to 13 in-lb.
4.2
Wiring the Output Power to the Motor
Table 4.2 describes the drive output power connections shown in figure 4.1. All output
power connections should be wired as follows:
•
Minimum 6 AWG wire terminated with ring lugs sized for a 3/8” stud (drive end).
•
torque all connections between 90 to 100 in-lb.
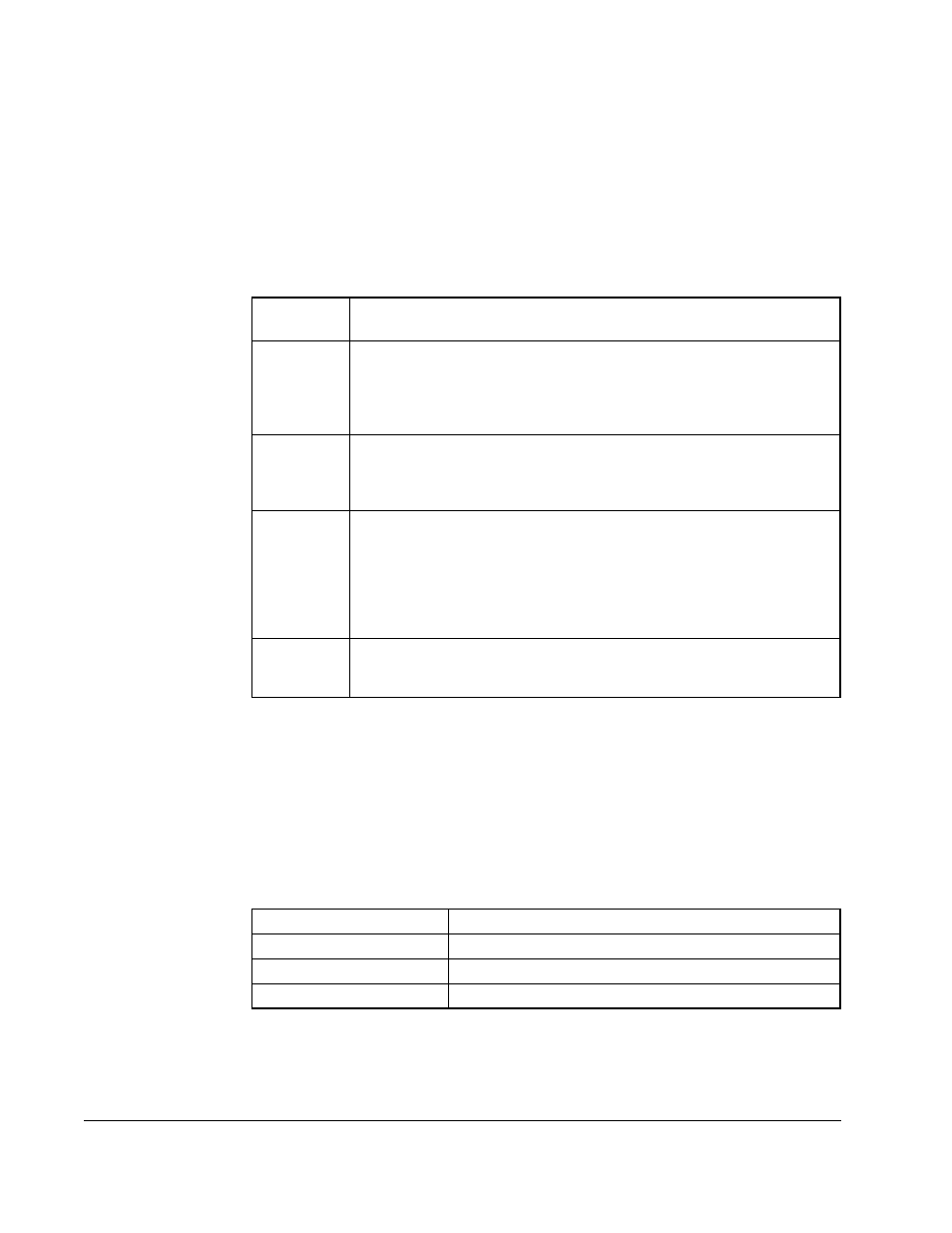
Table 4.1 – External Control Inputs and Ouputs
Terminal
Label
Function
ON/OFF
ON = Closed to run motor
OFF = Open to stop motor
There is an approximate delay of 1.0 second at startup.
Peak input current = 0.2 A, approximate 0.02 A average continuous
HI/LO
LO (speed) = Closed for 3/4 of maximum speed.
HI (speed) = Open for maximum speed.
Nominal input current = 50 mA
POT1
POT2
Analog speed reference input. POT1 is the signal and POT2 is the
return.
The input signal range is 0 to 4.5 VDC.
May also be used with a 1000 ohm pot between POT1 and POT2 if
appropriate jumpers are selected.
FAULT
Output fault indication. The fault output will sink up to 500 mA when
operating normally, and sink 0 A when the drive is faulted or not
activated.
Table 4.2 – Output Power Connections
Terminal Label
Function
U
Connect to motor terminal “U”
V
Connect to motor terminal “V”
W
Connect to motor terminal “W”