Rockwell Automation TD200 AC Drive V1.0, 0.3-20V RMS, 3-Ph, 63A User Manual
Page 15
Setting the Drive Jumpers
2-5
2.6
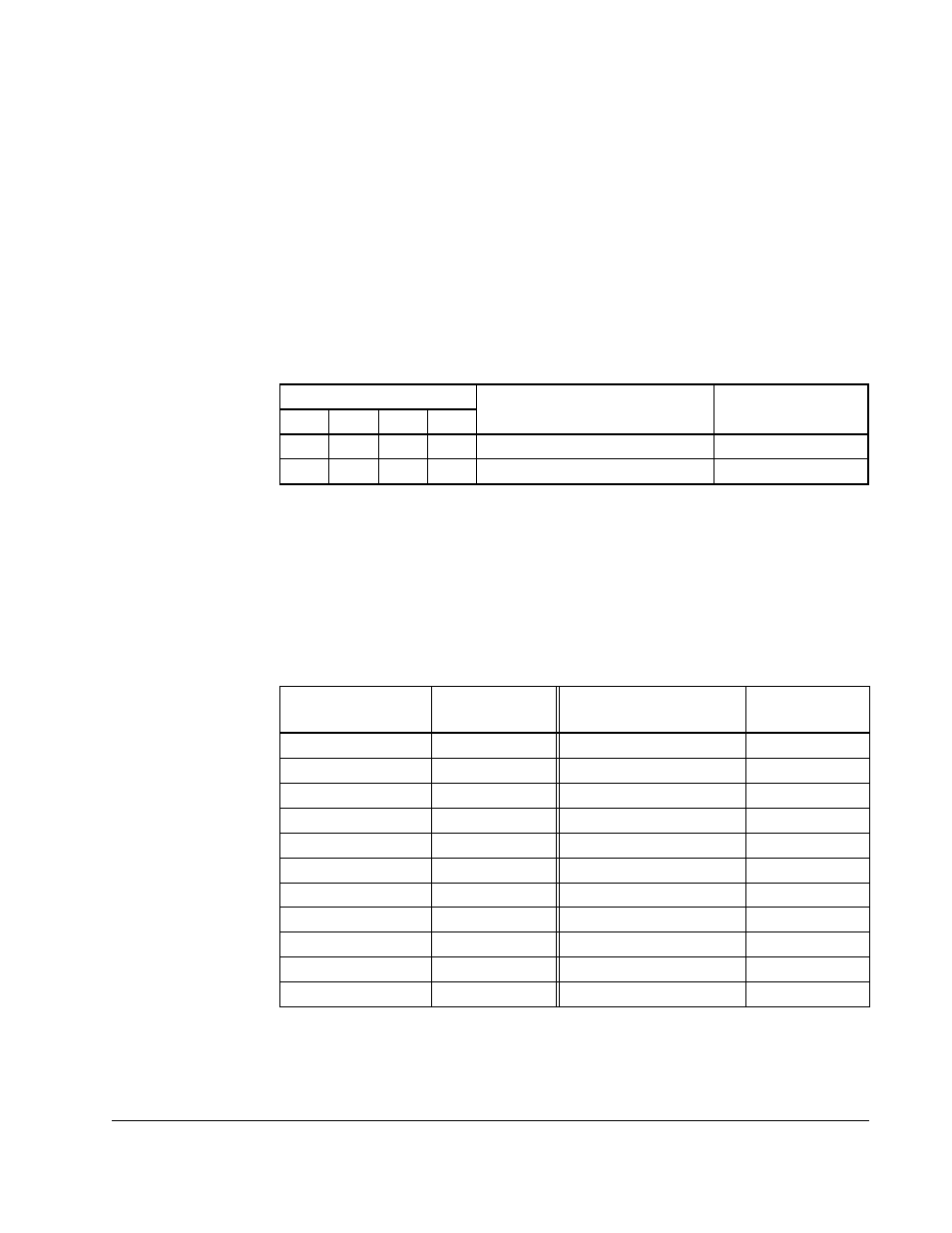
Setting the External Speed Control Jumpers (J17
through J19)
The motor speed can be manually adjusted between minimum speed and full speed
with 0 to 4.5 volt voltage reference, or a 1000 ohm potentiometer. To make the
external speed control inputs (POT1, POT2) active, jumper J1 (Speed Reference
Jumper) must be in the Speed Ref position (J1 = 1), as described in section 2.2.
Jumpers J17 through J19 configure the external speed control function for either an
external 1 Kohm pot control or a 0 to 4.5 VDC voltage control (see table 2.4). Zero
ohms and zero volts are minimum speed. For the voltage control, the positive input is
into the POT1 terminal, the return being POT2. In either configuration, the "HI/LO"
external input is active.
Table 2.5 shows what the output frequency is for a given input voltage reference or
external resistance. When driving the input with an external voltage source, the source
sees a 200 Kohm input impedance. When driving an external potentiometer, the drive
input circuit sources 5 mA. When configured for external speed control (pot), an open
circuit condition will cause the drive to default to 128 Hz. For the pot control selection,
a resistor should be installed across the input if 128 Hz is beyond a safe operational
speed. For voltage source control, an open circuit will cause the drive to default to
2 Hz.
Table 2.4 – External Speed Control Jumper Settings
Jumpers
External Speed Control
Min/Max Speed
J1
J17
J18
J19
1
0
0
0
External 1 Kohm pot
0 ohm / 1 kohm
1
1
1
1
External 0 to 4.5 V control
0 VDC / 4.5 VDC
Table 2.5 – Output Frequencies for Input Voltage Reference or External Resistance
Volt Reference (V)
J17 J18 J19 = 1 1 1
Output
Frequency (Hz)
External Resistance (
Ω
)
J17 J18 J19 = 0 0 0
Output
Frequency (Hz)
0
2
0
3
0.45
15
50
16
0.90
28
100
26
1.35
41
250
54
1.80
54
300
62
2.25
67
393
75
2.70
80
500
88
3.15
93
750
113
3.60
106
825
119
4.05
118
910
125
4.50
128
1000
128