Rockwell Automation 2198-Hxxx Kinetix 5500 Servo Drives Installation Instructions User Manual
Page 13
Kinetix 5500 Servo Drives 13
Rockwell Automation Publication 2198-IN001C-EN-P - January 2014
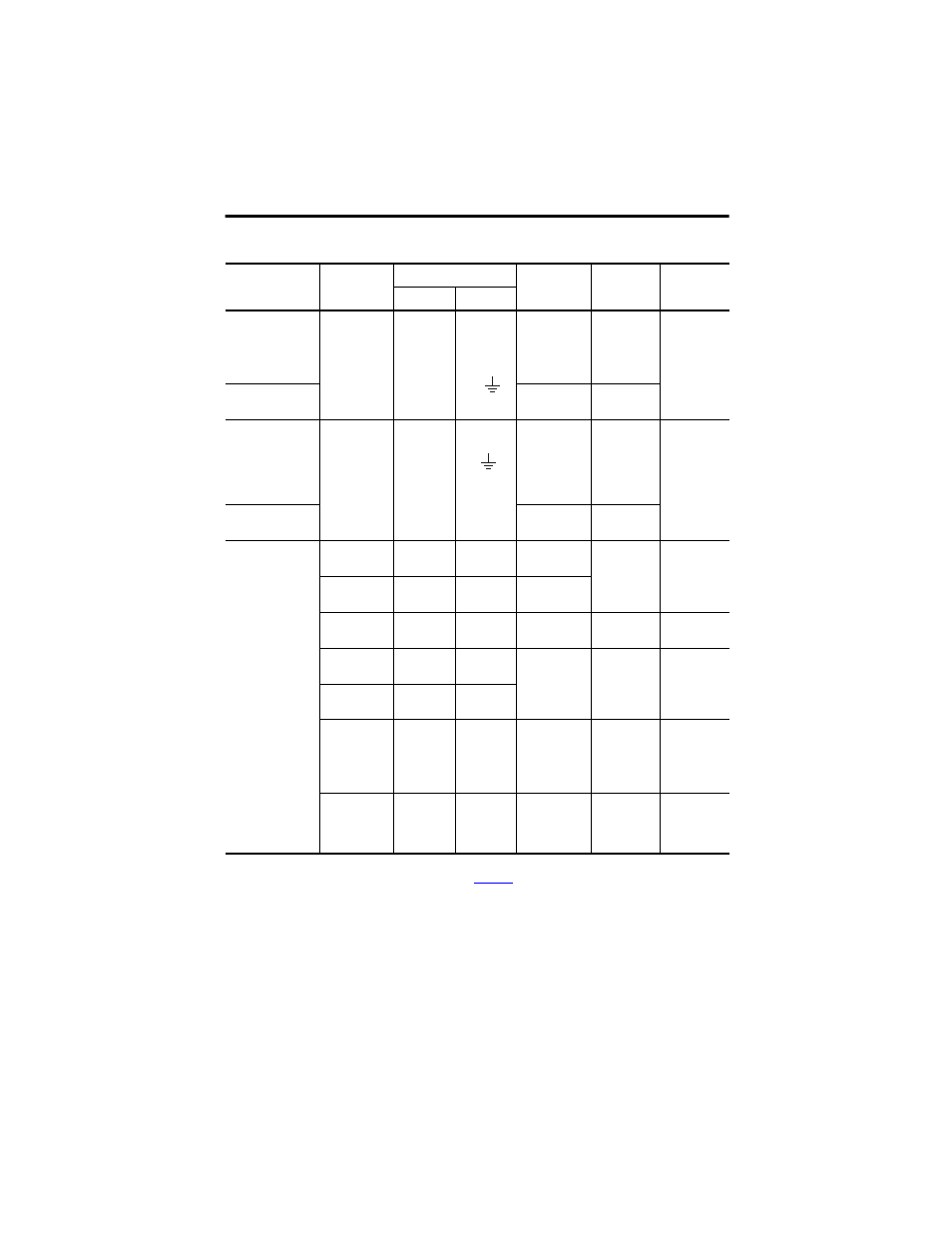
Kinetix 5500 Drive Power and I/O Wiring Requirements
Kinetix 5500 Drive
Cat. No.
Description
Connects to Terminals
Wire Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
Pin
Signal
2198-H003-ERS
x
2198-H008-ERS
x
2198-H015-ERS
x
2198-H025-ERS
x
2198-H040-ERS
x
Mains input
power
IPD-1
IPD-2
IPD-3
IPD-4
1.5…4
(16…12)
8.0 (0.31)
0.5…0.6
(4.4…5.3)
2198-H070-ERS
x
1.5…6
(16…10)
10.0 (0.39)
2198-H003-ERS
x
2198-H008-ERS
x
2198-H015-ERS
x
2198-H025-ERS
x
2198-H040-ERS
x
Motor power
MP-1
MP-2
MP-3
MP-4
Motor power
cable depends
on motor/drive
combination.
0.75…2.5
(1)
(18…14)
(1)
Building your own cables or using third-party cables is not an option. Use single motor cable catalog number 2090-CS
xM1DF-xxAAxx. Refer to the
Kinetix Motion Accessories Specifications Technical Data, publication
, for cable specifications.
8.0 (0.31)
0.5…0.6
(4.4…5.3)
2198-H070-ERS
x
2.5…6
(14…10)
10.0 (0.39)
2198-H
xxx-ERSx
PELV/SELV
24V power
CP-1
CP-2
24V+
24V-
2.5…0.5
(14…20)
7.0 (0.28)
0.22…0.25
(1.9…2.2)
Brake power
BC-1
BC-2
MBRK+
MBRK-
N/A
DC Bus power
DC-1
DC-2
DC+
DC-
N/A
(2)
N/A
(2)
(2)
DC bus connections are always made from drive-to-drive over the bus bar connection system. These terminals do not receive discrete wires.
N/A
(2)
Shunt power
(frames 2 and 3)
RC-1
RC-2
DC+
SH
4…0.5
(12…20)
8.0 (0.31)
0.5…0.6
(4.4…5.3)
Shunt power
(frame 1)
RC-1
RC-2
SH
DC+
Safety
(3)
(3)
These signals and the safe torque-off (STO) connector apply to only the 2198-H
xxx-ERS drives.
ST0-1
ST0-2
ST0-3
ST0-4
ST0-5
SB+
SB-
S1
SC
S2
1.5…0.2
(16…24)
10.0 (0.39)
N/A
(4)
(4)
This connector uses spring tension to hold wires in place.
Digital inputs
IOD-1
IOD-2
IOD-3
IOD-4
IN1
(5)
COM
IN2
SHLD
(5)
This signal has dual-functionality. You can use IN1 (IOD-1) as registration or Home input.
1.5…0.2
(16…24)
10.0 (0.39)
N/A
L1
L2
L3
W
V
U