Wiring requirements – Rockwell Automation 2198-Hxxx Kinetix 5500 Servo Drives Installation Instructions User Manual
Page 12
12 Kinetix 5500 Servo Drives
Rockwell Automation Publication 2198-IN001C-EN-P - January 2014
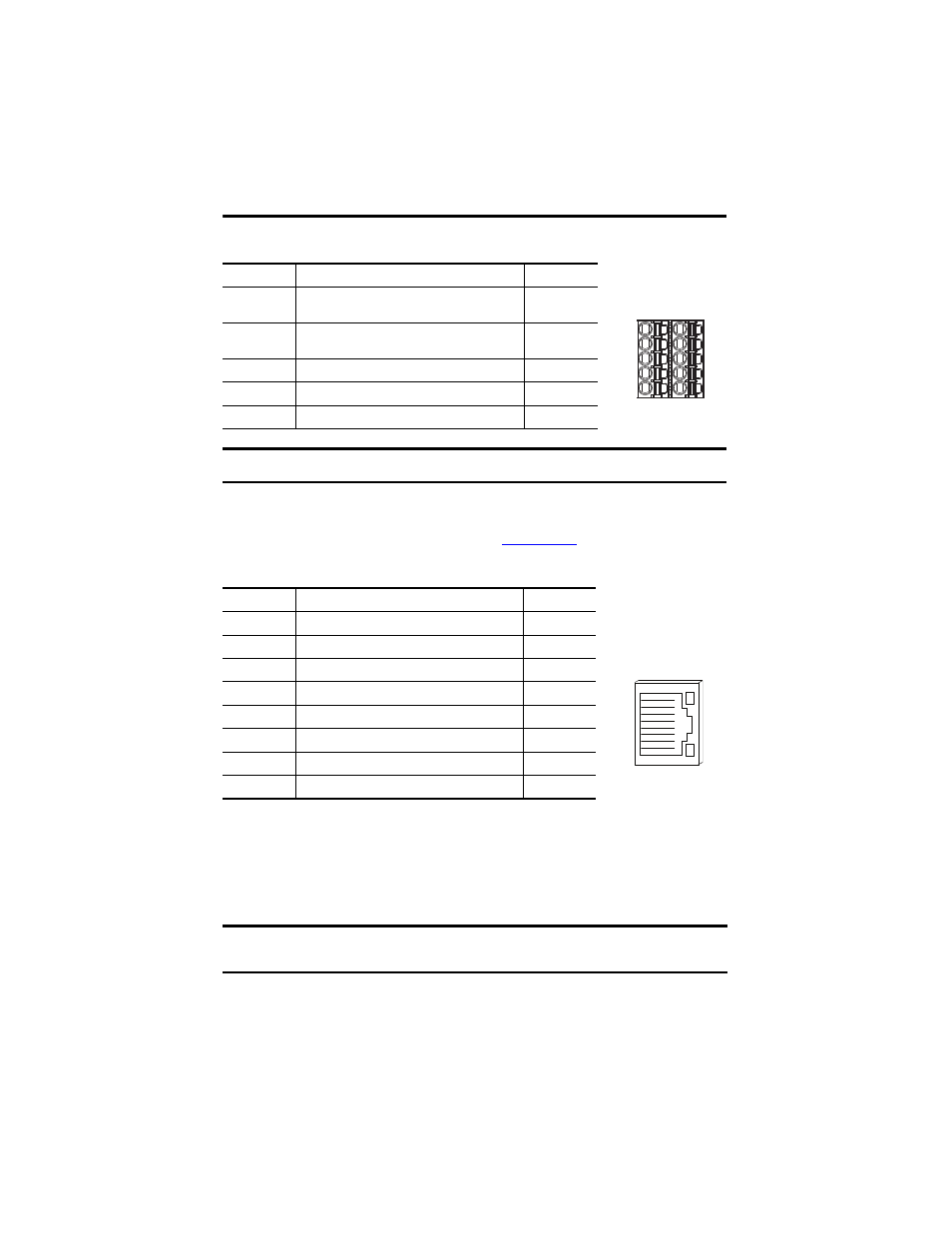
Safe Torque Off (STO) Connector Pinout
The 2198-H
xxx-ERS drives ship with the safe torque-off function enabled. Connect the safe
torque-off inputs to a safety circuit or install bypass wiring to enable motion. Refer to the
Kinetix 5500 Servo Drives User Manual, publicat
re information.
Ethernet Communication PORT1 and PORT2 Pinout
Wiring Requirements
Wire must be copper with 75
°C (167 °F) minimum rating. Phasing of mains AC power is
arbitrary and earth ground connection is required for safe and proper operation.
STO Pin
Description
Signal
1
Safety bypass plus signal. This signal is jumped to the
safety inputs to enable motion without safety
SB+
2
Safety bypass minus signal. This signal is jumped to
safety common to enable motion without safety
SB-
3
Safe-stop input channel 1
S1
4
Safe-stop input common
SC
5
Safe-stop input channel 2
S2
IMPORTANT
The safe torque-off (STO) connector applies to only the 2198-H
xxx-ERS drives.
Port Pin
Description
Signal
1
Transmit port (+) data terminal
+ TX
2
Transmit port (-) data terminal
- TX
3
Receive port (+) data terminal
+ RX
4
–
–
5
–
–
6
Receive port (-) data terminal
- RX
7
–
–
8
–
–
IMPORTANT
The National Electrical Code and local electrical codes take precedence over the values and
methods provided.
Pin 1
1
8
Standard RJ45