Rockwell Automation 2097-Vxxx Kinetix 350 Single-axis EtherNet/IP Servo Drive Installation Instruction User Manual
Page 12
12 Kinetix 350 Single-axis EtherNet/IP Servo Drives
Rockwell Automation Publication 2097-IN008D-EN-P - July 2013
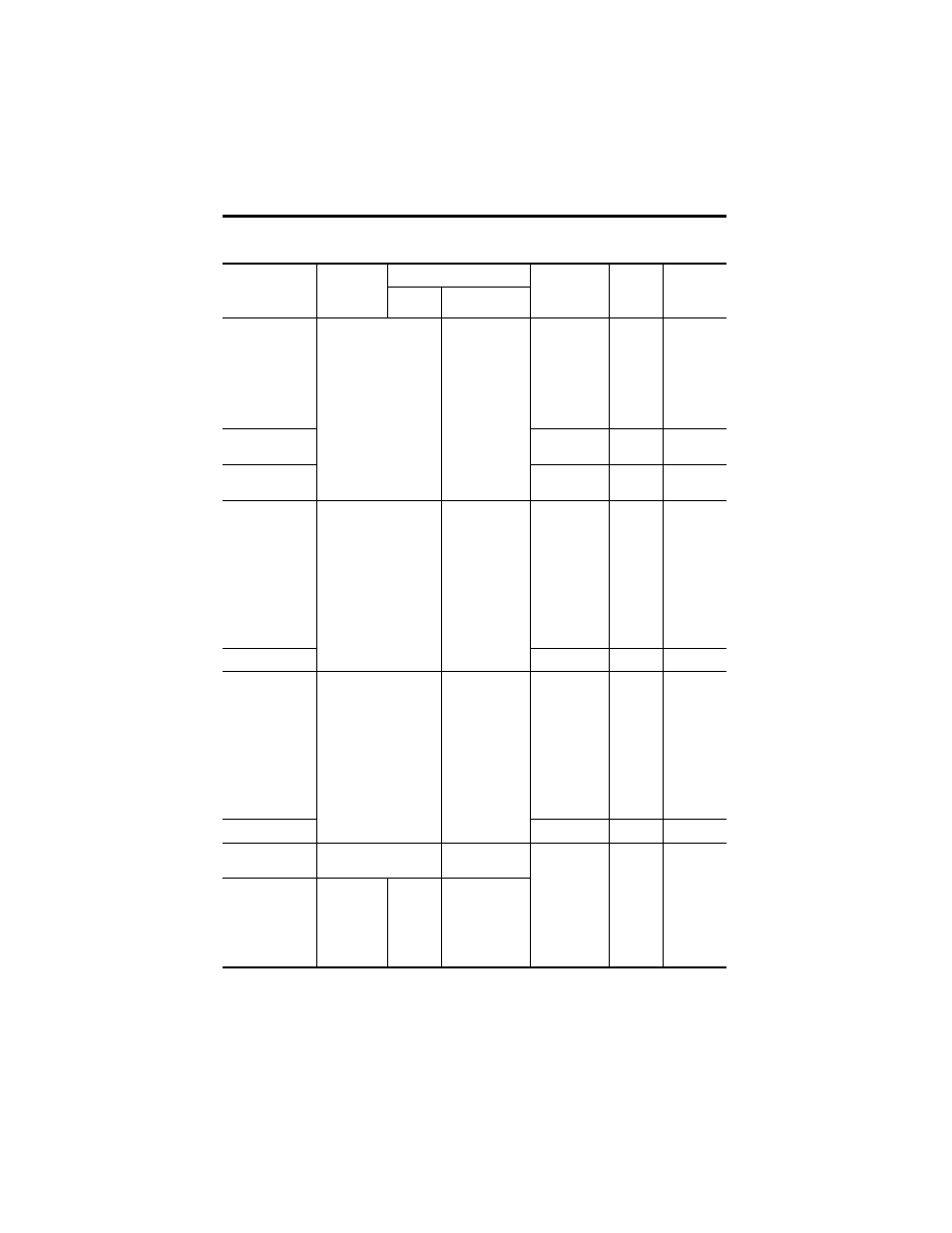
Kinetix 350 Drive Power-wiring Requirements
Cat. No.
Description
Terminals
Recommended
Wire Size
mm
2
(AWG)
Strip
Length
mm (in.)
Torque
Value
N•m (lb•in)
Pin
Signal
2097-V31PR0-LM
2097-V32PR0-LM
2097-V32PR2-LM
2097-V33PR1-LM
2097-V33PR3-LM
2097-V34PR3-LM
2097-V34PR5-LM
2097-V34PR6-LM
Mains input power
L3
L2
L1
PE
2.5 (14)
7 (0.28)
0.5 (4.5)
2097-V32PR4-LM
2097-V33PR5-LM
4.0 (12)
7 (0.28)
0.5 (4.5)
2097-V31PR2-LM
2097-V33PR6-LM
6.0 (10)
7 (0.28)
0.56…0.79
(5.0…7.0)
2097-V31PR0-LM
2097-V32PR0-LM
2097-V32PR2-LM
2097-V32PR4-LM
2097-V33PR1-LM
2097-V33PR3-LM
2097-V33PR5-LM
2097-V34PR3-LM
2097-V34PR5-LM
2097-V34PR6-LM
2097-V31PR2-LM
Motor power
PE
W
V
U
2.5 (14)
7 (0.28)
0.5 (4.5)
2097-V33PR6-LM
4.0 (12)
7 (0.28)
0.5 (4.5)
2097-V31PR0-LM
2097-V32PR0-LM
2097-V32PR2-LM
2097-V32PR4-LM
2097-V33PR1-LM
2097-V33PR3-LM
2097-V33PR5-LM
2097-V34PR3-LM
2097-V34PR5-LM
2097-V34PR6-LM
2097-V31PR2-LM
Shunt resistor and DC bus
(1)
+
+
SH
–
–
2.5 (14)
7 (0.28)
0.5 (4.5)
2097-V33PR6-LM
4.0 (12)
7 (0.28)
0.5 (4.5)
2097-V3
xPRx-LM
Control back-up power
+24V DC
Return
1.5 (16)
6 (0.25)
0.5 (4.5)
2097-V3
xPRx-LM
Safe torque-off
STO-1
(2)
STO-2
STO-3
STO-4
STO-5
STO-6
+24V DC Control
Control COM
Safety Status
Safety Input 1
Safety COM
Safety Input 2
(1)
Use only for shunt resistor connection.
(2)
Use only for bypassing the STO circuit.