Modes – 3D Robotics X8-M User Manual
Page 25
24
Auto - fly a mission
Fly an autonomous mission. This is the mode that the X8 will use to create the map.
Altitude hold - assisted manual control
Altitude hold mode provides manual control of roll, pitch, and yaw, while allowing the
autopilot to maintain the current altitude automatically. Set the left stick to center,
and the copter will automatically maintain the current altitude. Raise the throttle stick
above center to increase altitude (and to take off), and lower the throttle stick below
center to decrease altitude. Adjust altitude and orientation with the left stick, and
navigate with the right stick.
Loiter - hover
With automatic autopilot control of altitude, position, and orientation, loiter is the
easiest way to fly. Just release the sticks and the copter will hover in place.
Return to launch (RTL) - recall and land
Activate RTL during the mission to end your flight automatically. RTL commands
the X8 to achieve a minimum altitude of 15 meters, return to the launch point, hover
for five seconds, and land. Use the right stick to adjust the position of the X8 during
landing,
Stabilize - full manual control
Stabilize allows full manual control of altitude, position, and orientation without
autopilot assistance.
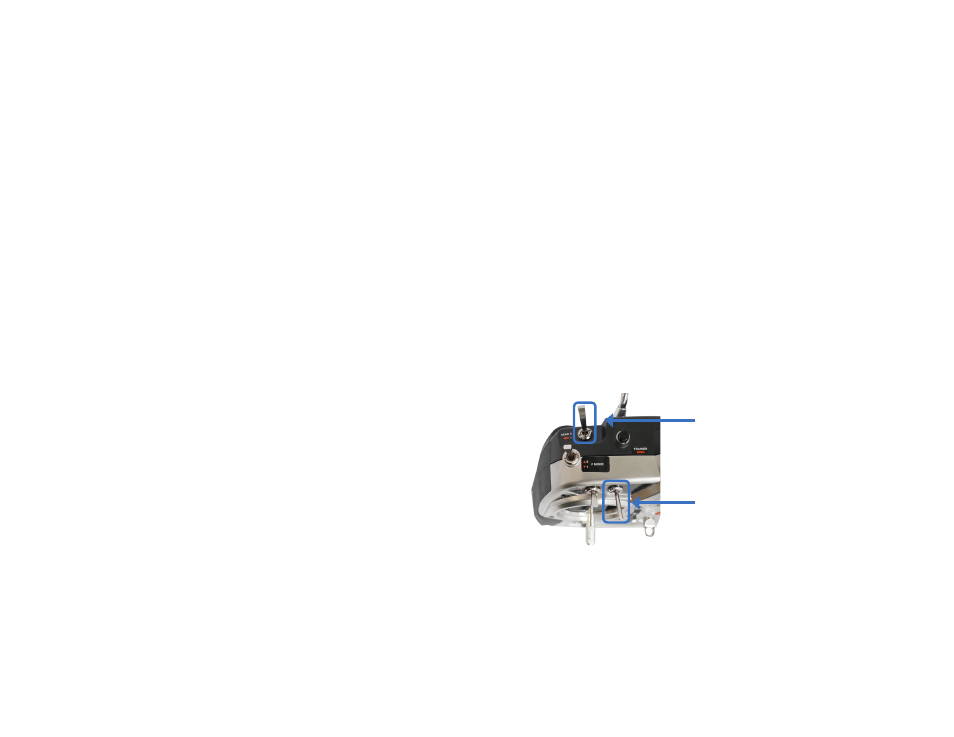
GEAR/MIX selects the set of modes.
FLAP/GYRO selects the specific mode,
either 0, 1, or 2.
To select a flight mode:
First, set the GEAR/MIX switch to select a set of modes. Then use the
FLAP/GYRO switch to 0, 1, or 2 to select a specific mode.
With GEAR/MIX set to GEAR,
set FLAP/GYRO to:
0 for Stabilize
1
for
Loiter
2
for
Auto
With GEAR/MIX set to MIX,
set FLAP/GYRO to:
0 for Stabilize
1
for
Altitude hold
2
for
RTL
Modes
RC controller (top)