Table 7-5: sample points – PNI SeaTRAX User Manual
Page 49
PNI Sensor Corporation
DOC#1018154 r02
SeaTRAX User Manual
Page 44
kDeclination (Config. ID 1d)
This sets the declination angle to determine True North heading. Positive declination
is easterly declination and negative is westerly declination. This is not applied unless
kTrueNorth is set to TRUE.
kTrueNorth (Config. ID 2
d
)
Flag to set compass heading output to true north heading by adding the declination
angle to the magnetic north heading.
kBigEndian (Config. ID 6
d
)
Sets the Endianness of packets. TRUE is Big Endian. FALSE is Little Endian.
kMountingRef (Config. ID 10
d
)
This sets the reference orientation for the module. Please refer to and Figure 4-2 for
additional information
kUserCalNumPoints (Config. ID 12
d
)
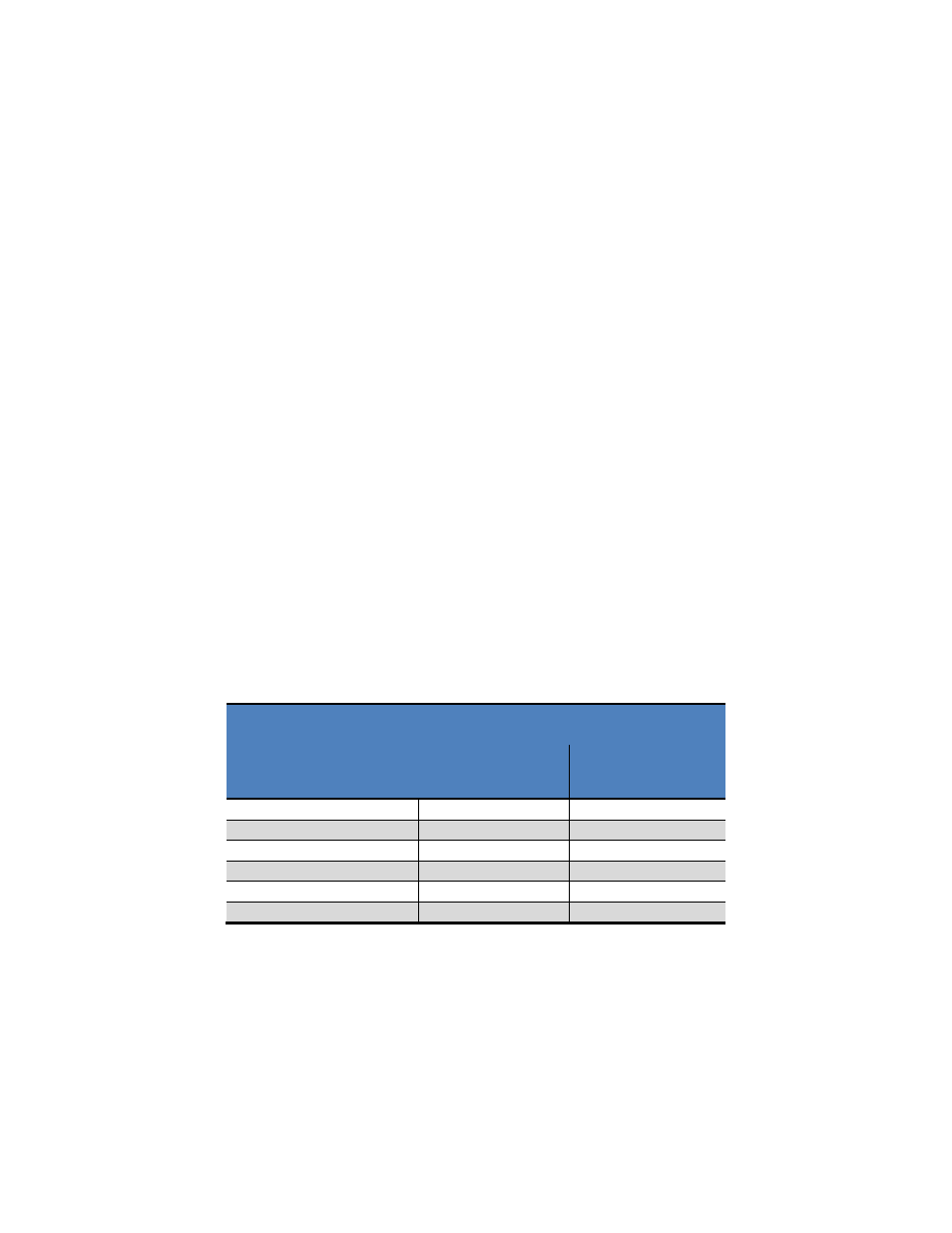
The user must select the number of points to take during a calibration. Table 7-5
provides the “Minimum Recommended” number of sample points, as well as the full
“Allowable Range”. The “Minimum Recommended” number of samples normally is
sufficient to meet the SeaTRAX’s heading accuracy specification, while less than this
may make it difficult to meet specification. See Section 5 for additional information.
Table 7-5: Sample Points
Calibration Mode
Number of Samples
Allowable
Range
Minimum
Recommended
Full-Range
10 to 32
12
2D Calibration
10 to 32
12
Limited-Tilt
10 to 32
12
Hard-Iron-Only
4 to 32
6
Accelerometer-Only
12 to 32
18
Mag-and-Accel
12 to 32
18
kUserCalAutoSampling (Config. ID 13
d
)
This flag is used during user calibration. If set to TRUE, the module automatically
takes calibration sample points once the minimum change requirement is met. If set
to FALSE, the module waits for kTakeUserCalSample to take a sample with the
condition that a magnetic field vector component delta is greater than 5 µT from the