Hard-iron-only calibration, Accelerometer calibration, 2 accelerometer calibration – PNI SeaTRAX User Manual
Page 22: 4 hard-iron-only calibration
PNI Sensor Corporation
DOC#1018154 r02
SeaTRAX User Manual
Page 17
Note that a similar and acceptable alternative pattern would be to follow the
recommended 12 point Full-Range Calibration pattern, but substituting the >±45
° of pitch
with whatever pitch can be achieved and the ±30° to ±40° or roll with whatever roll can
be achieved up to these limits. (See Section 5.1.1)
5.1.4
Hard-Iron-Only Calibration
It is not uncommon for the hard-iron magnetic distortions around the SeaTRAX to
change. Some reasons for this include significant temperature change or temperature
shock to a system, as well as gradual aging of components. A Hard-Iron-Only
Calibration allows for quick recalibration of the SeaTRAX for hard-iron effects, and
generally is effective for operation and calibration in the tilt range of 3° or more (
≥45° is
preferred). The recommended 6 point calibration pattern given below is a circle of
alternately tilted, evenly spaced points, with as much tilt as expected during use.
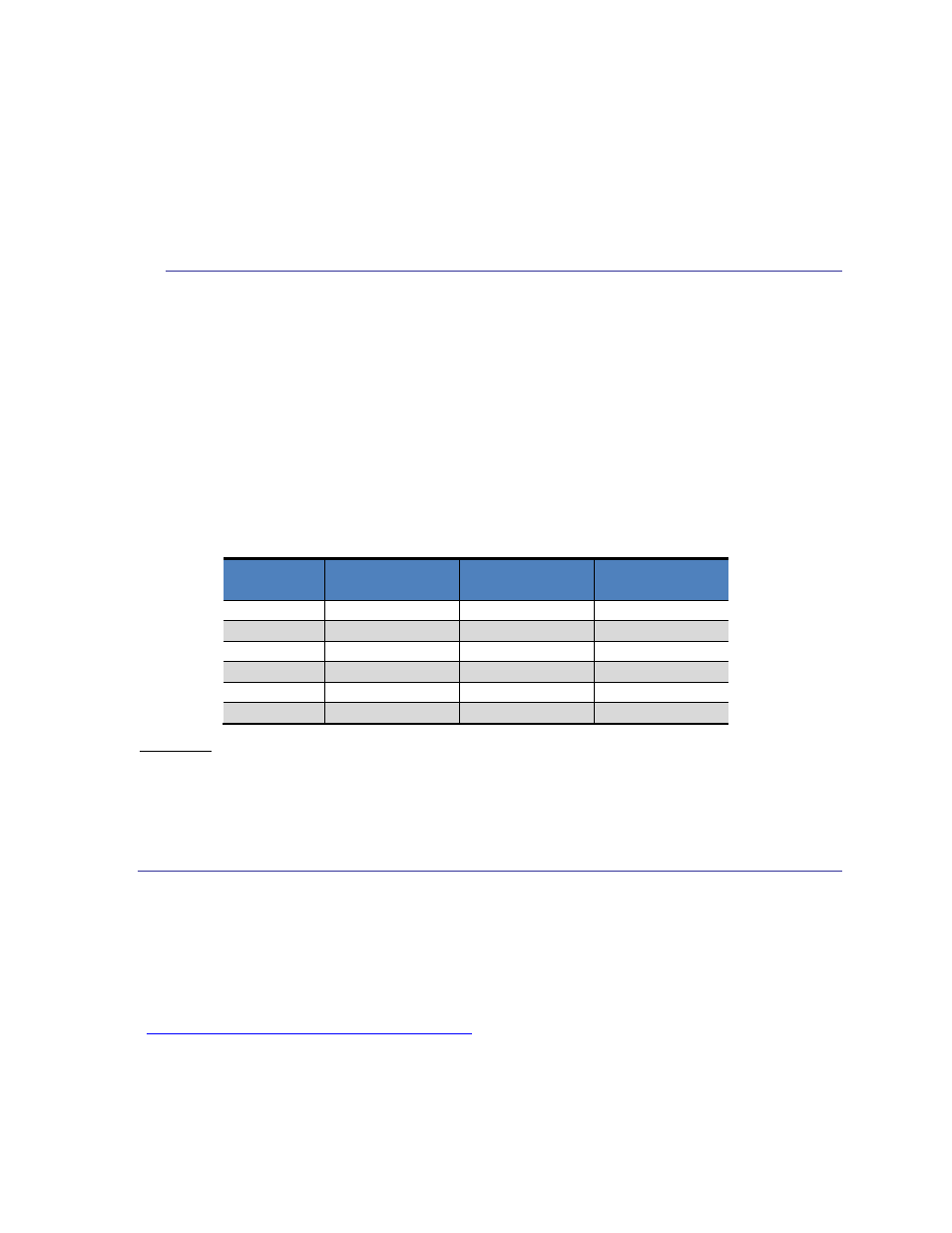
Table 5-5: 6 Point Hard-Iron-Only Calibration Pattern
Sample #
Yaw
Pitch
1
Roll
1
1
0°
max. negative
max. negative
2
60°
max. positive
max. positive
3
120°
max. negative
max. negative
4
180°
max. positive
max. positive
5
240°
max. negative
max. negative
6
300°
max. positive
max. positive
Footnote:
1. For best results, the tilt experienced during calibration should match that experienced
in service. For example, if the SeaTRAX will be subject to ±45° of pitch and roll when
in service,
then “max negative” should be -45° and “max positive” should be +45°.
5.2 Accelerometer Calibration
The SeaTRAX uses a MEMS accelerometer to measure attitude. This data is output as pitch
and roll data. Additionally, the accelerometer data is critical for establishing an accurate
heading reading when the SeaTRAX is tilted, as discussed in the PNI white paper “Tilt-
Induced Heading Error in a 2-Axis Compass”, which can be found on PNI’s web site
The SeaTRAX algorithms assume the accelerometer only measures the gravitational field. If
the SeaTRAX is accelerating, this will result in the SeaTRAX calculating an inaccurate