PNI TCM 5 User Manual
Page 37
PNI Sensor Corporation
Doc #1007537 r12
TCM3 & TCM5 User Manual
– Sept 2012
Page 37
Standard: When selected the unit is to be mounted with the main board in a horizontal position (the Z
axis magnetic sensor is vertical).
X Sensor Up: When selected the unit is to be mounted with the main board in a vertical position (the X
axis magnetic sensor is vertical).
Y Sensor Up: When selected the unit is to be mounted with the main board in a vertical position (the Y
axis magnetic sensor is vertical).
Standard 90 Degrees: When selected the unit is to be mounted with the main board in a horizontal
position but rotated so the arrow is pointed 90 degrees counterclockwise to the front of the host system.
Standard 180 Degrees: When selected the unit is to be mounted with the main board in a horizontal
position but rotated so the arrow is pointed 180 degrees counterclockwise to the front of the host system.
Standard 270 Degrees: When selected the unit is to be mounted with the main board in a horizontal
position but rotated so the arrow is pointed 270 degrees counterclockwise to the front of the host system.
kUserCalStableCheck This flag is used during user calibration. If set to FALSE, the module will take a
point if the magnetic field has changed more than 23 µT in either axis. If set to TRUE the unit will take a
point if the magnetic field has a stability of 30µT in each direction and the previous point changed more
than 5µT and acceleration vector delta within 2 mg.
kUserCalNumPoints The maximum number samples taken during user calibration.
kUserCalAutoSampling This flag is used during user calibration. If set to TRUE, the module
continuously takes calibration sample points until the set number of calibration samples. If set to FALSE,
the module waits for kTakeUserCalSample frame to take a sample with the condition that a magnetic field
vector component delta is greater than 5 micro Tesla from the last sample point.
kBaudRate Baud rate index value. A power-down power-up cycle is required when changing the baud
rate.
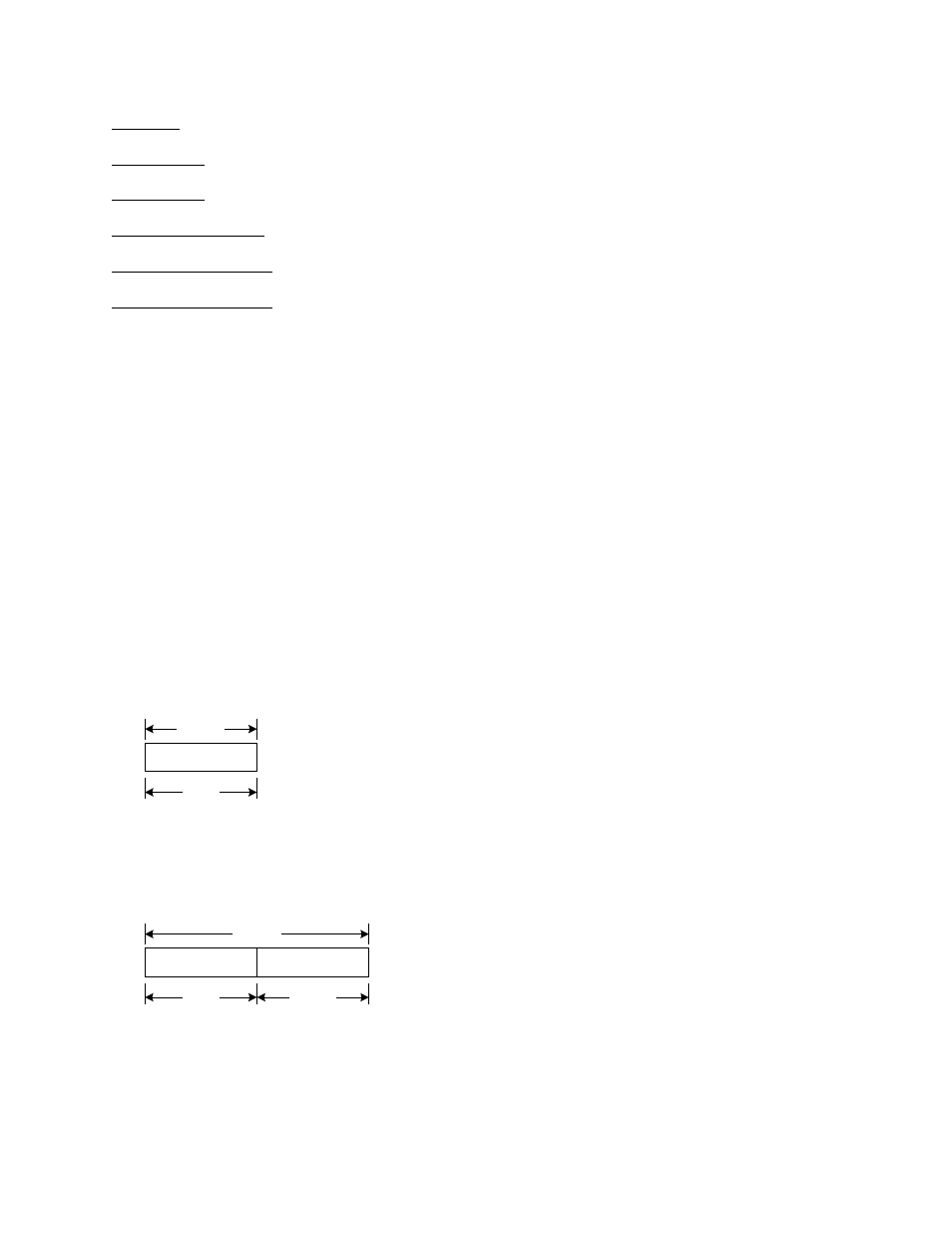
kGetConfig (frame ID 7)
This frame queries the module for the current internal configuration value. The payload contains the
configuration ID requested.
Config ID
UInt8
Payload
kConfigResp (frame ID 8)
This frame is the response to kGetConfig frame. The payload contains the configuration ID and value.
Config ID
Value
UInt8
ID
Specific
Payload
Example:
If a request to get the set declination angle, the payload would look like: