PNI TCM 5 User Manual
Page 36
PNI Sensor Corporation
Doc #1007537 r12
TCM3 & TCM5 User Manual- Sept 2011
Page 36
1
10.0
Declination ID
Declination
Angle
(Float32)
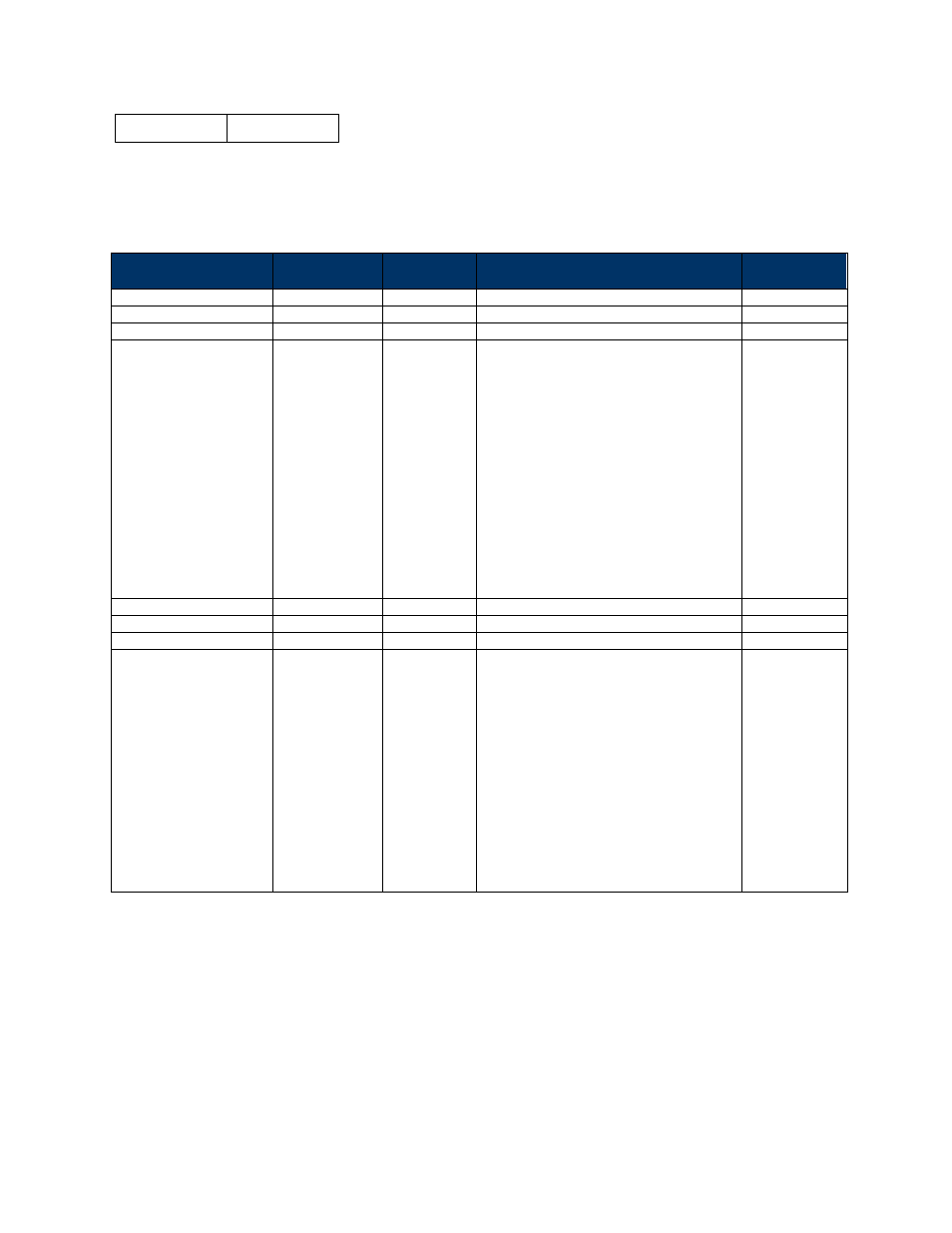
Configuration Identifiers
Settings
Configuration
ID
Format
Units/ Range
Default
Values
kDeclination
1
Float32
-
180˚ to 180˚
0˚
kTrueNorth
2
Boolean
True or False
False
kBigEndian
6
Boolean
True or False
True
kMountingRef
10
UInt8
1 = Standard
2 = X axis up
3 = Y axis up
4 = -90° heading offset
5 = -180° heading offset
6 = -270° heading offset
7 = Z down
8 = X + 90°
9 = X + 180°
10 = X + 270°
11 = Y + 90°
12 = Y + 180°
13 = Y + 270°
14 = Z down + 90°
15 = Z down + 180°
16 = Z down + 270°
1
kUserCalStableCheck
11
Boolean
True or False
True
kUserCalNumPoints
12
UInt32
12
– 50
50
kUserCalAutoSampling
13
Boolean
True or False
True
kBaudRate
14
UInt8
0
– 300
1
– 600
2
– 1200
3
– 1800
4
– 2400
5
– 3600
6
– 4800
7
– 7200
8
– 9600
9
– 14400
10
– 19200
11
– 28800
12
– 38400
13
– 57600
14 - 115200
12
kDeclination
This sets the declination angle to determine True North heading. Positive declination is
easterly declination and negative is westerly declination. This is not applied until TrueNorth is set to
true.
kTrueNorth Flag to set compass heading output to true north heading by adding the declination angle to
the magnetic north heading.
kBigEndian Flag to set the Endianness of packets
kMountingRef This sets the reference orientation for the module.