NORD Drivesystems BU0710 User Manual
Page 29
6 Fault clearance
BU 0710 GB
29
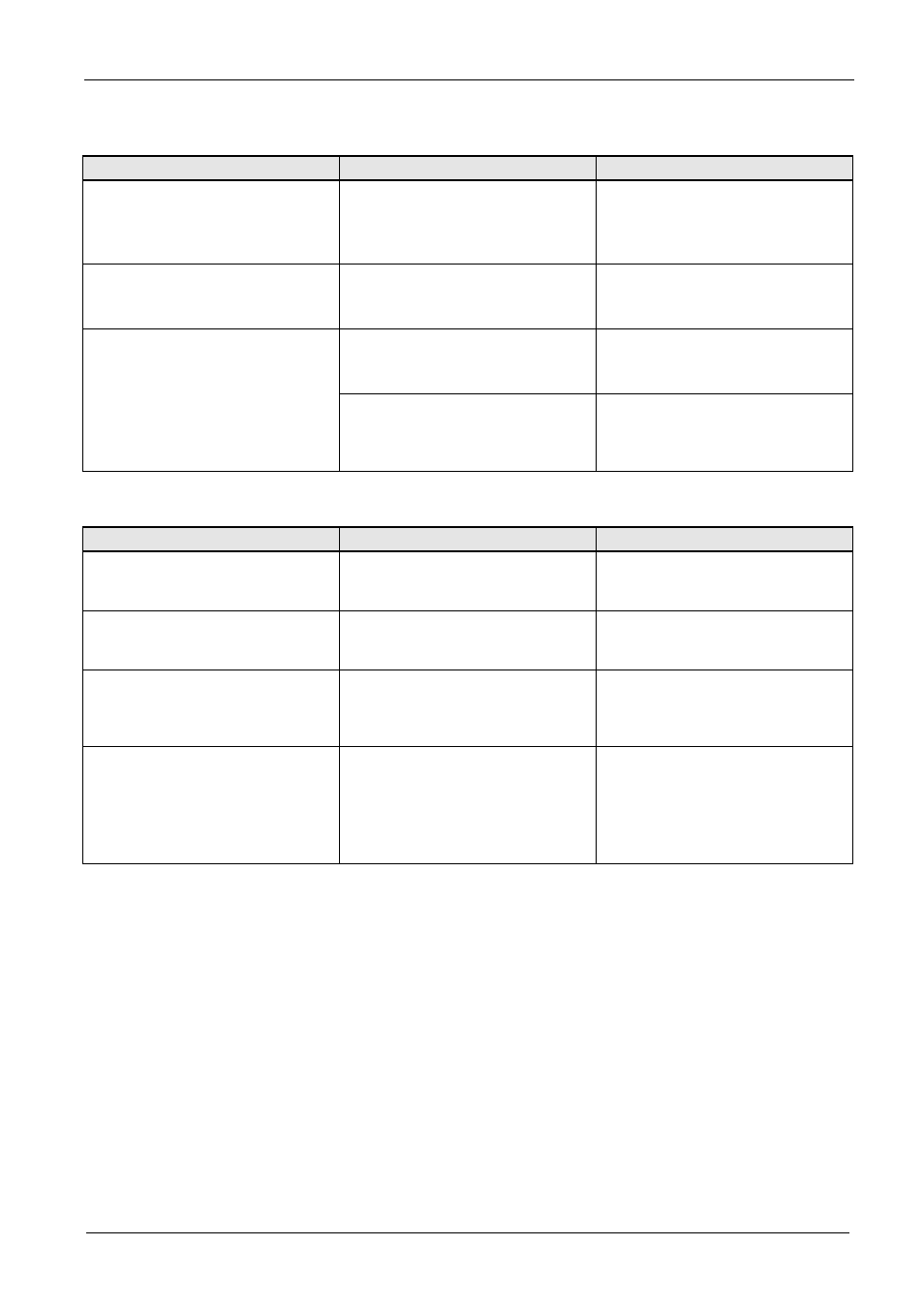
3. Typical error sources in position control with incremental position recognition (without absolute
encoder)
Symptom
Additional checking
Possible cause
Reference point error
• Reference point tracking
completed but failed
• Encoder lacks zero track, or
encoder is defective
Drive drifts away from desired
position
• Encoder cable affected by
interference pulses
Fault occurs even at low speed
(n < 1000 1/min))
• Encoder cable affected by
interference pulses
No repetitive accuracy when
moving into identical positions
several times
Fault occurs at high speed only
(n > 1000 1/min)
• Number of graduation marks
too high considering the length
of encoder cable / the cable
type (pulse frequency too high)
4. Typical error sources in position control with absolute encoder
Symptom
Additional checking
Possible causes
The same actual position value is
signalled over and over again and
remains steady afterwards
• Encoder connection is not
correct
Current position is displayed as an
erratic ("jumping") value although
the shaft does not move
• Encoder cables are affected by
interference pulses
Recognition function supplies
varying information on the same
position; sometimes the axle
seems to jump to and fro.
Is there any mechanical
irregularity?
• Axle is tight, getting jammed, or
does not move smoothly for
any other reason
Position value is not in accordance
with amount of encoder rotation or
is erratic => shaft encoder is
defective
Check absolute encoder
(detach it, set multiplication and
demultiplication parameters to 1,
turn encoder by hand: the position
indicated must be in accordance
with the encoder revolutions)
• Encoder
defective