NORD Drivesystems BU0710 User Manual
Page 24
NORDAC SK 700E Manual Posicon special extension
24
BU 0710 GB
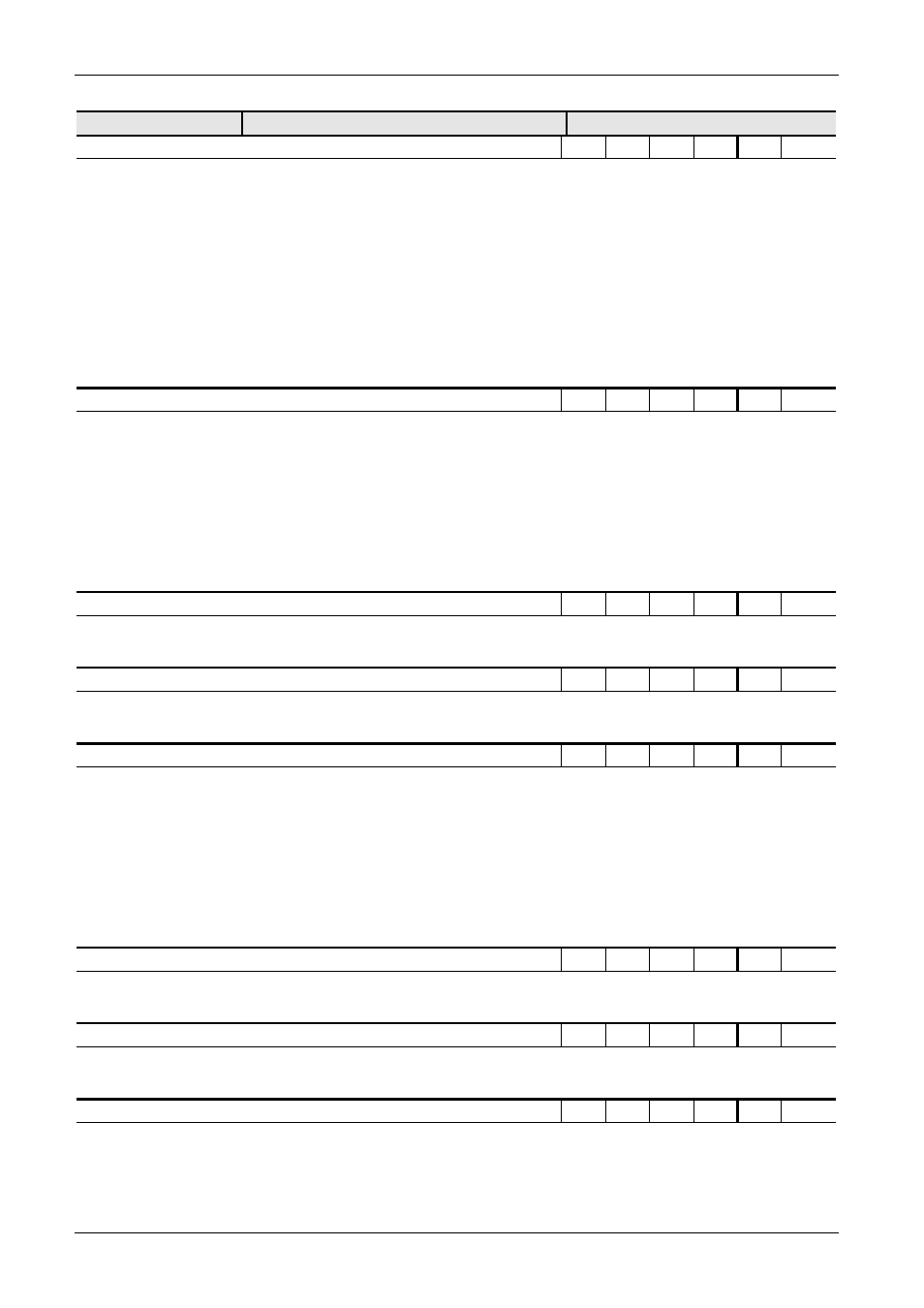
Parameter
Setting / Description / Note
Available with option
P623
Function digital input 12
POS
0...11
[ 8]
"Bit 5 position array / position increment array“ is the default setting
0:
No function
1:
Bit 0 position array / position increment array
2:
Bit 1 position array / position increment array
3:
Bit 2 position array / position increment array
4:
Bit 3 position array / position increment array
5:
Bit 4 position array / position increment array
6:
Bit 5 position array / position increment array
7:
Reference point tracking
8:
Reference point
9:
Teach-in
10:
Quit teach-In
11:
Reset position
P624 (P)
Function relay 3
POS
0...8
[ 2 ]
"Final position reached“ is the default setting
0:
No function
1:
Point of reference
2:
Final position reached
3:
Reference position
4:
Absolute value of reference position
5:
Value of position array
6:
Relay control via P541
7:
Reference position reached
8: Absolute value of reference position ensured
P625 (P)
Hysteresis relay 3
POS
0,00...99,99 rev
[ 1 ]
Difference between operate point and release point which will prevent oscillation of the output
signal.
P626 (P)
Reference position relay 3
POS
-50000...50000,000 rev
[ 0 ]
Reference position for the settings 3, 4 and 7, 8 of relay 3
P627 (P)
Function relay 4
POS
0...8
[ 0 ]
Default setting is "no function"
0:
No function
1:
Reference point
2:
Final position reached
3:
Reference position
4:
Absolute amount of reference position
5:
Value of position array
6:
Relay controlled via P541
7:
Reference position reached
8: Absolute value of reference position ensured
P628 (P)
Hysteresis relay 4
POS
0,00...99,99 rev
[ 1 ]
Difference between operate and release point preventing oscillation of the output signal.
P629 (P)
Reference position relay 4
POS
-50000...50000,000 rev
[ 0 ]
Reference position for the settings 3, 4 and 7, 8 of relay 4
P630 (P)
Pos. synchronization error
POS
0,00...99,99 rev
[ 0 ]
The allowable deviation between estimated and actual position can be set. As soon as a
desired position is reached, the estimated position is set to the current actual position.
By adopting a "0" setting the synchronization error monitoring function can be deactivated.