NORD Drivesystems BU0710 User Manual
Page 28
NORDAC SK 700E Manual Posicon special extension
28
BU 0710 GB
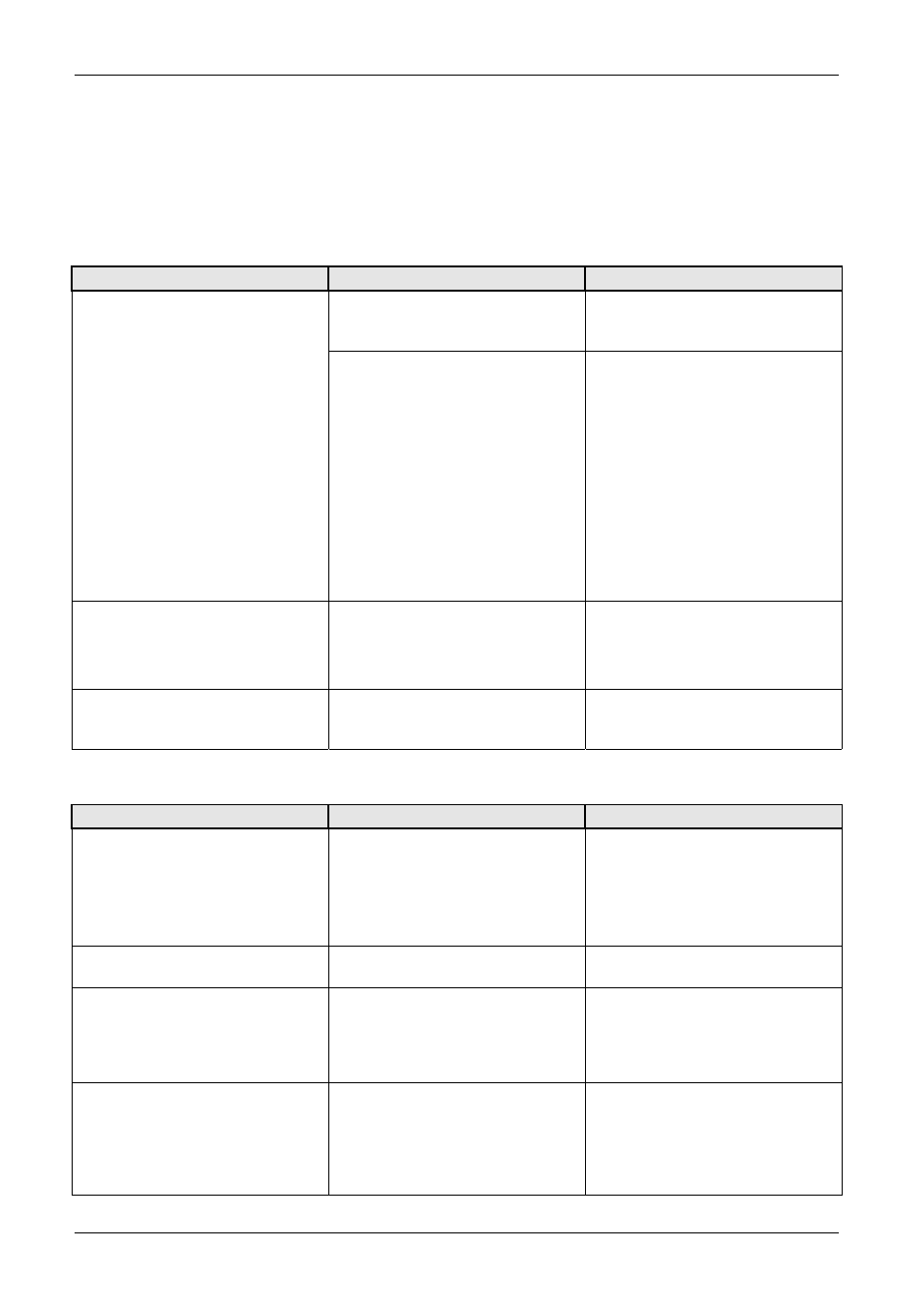
6.2 Table of errors and possible causes
In the table below the most frequent error sources are listed along with the characteristic symptoms. For
trouble shooting best proceed in the same order as when starting up the system, that is check first whether the
shaft runs correctly without being controlled, and only then go on to testing the speed and the position
controller.
1. Error sources while the system is operated in the servo mode (without position control)
Symptom
Additional checking
Possible cause
Change sign in P301
• Motor sense of rotation and
incremental encoder counting
direction do not match
Motor speed very low, motor runs
jerkily
• Inappropriate
incremental
encoder type (no RS422
outputs)
• Interruption of encoder cable
• No power is supplied to the
encoder
• The number of graduation
marks parameterised was
wrong
• Motor parameters are not
correct
• Encoder lacks one track
Motor speed is basically o.k.,
however there is some jerking at
lower speed
Overcurrent release at high speeds
Problems disappear when the
servo mode is switched off
• Incremental encoder was not
installed correctly
• Encoder
signals
disturbed
Overcurrent tripping during
deceleration
Motor in field weakening range
• With field weakening operation
in the servo mode, the torque
limit must not exceed 200%
2. General error sources
Symptom
Additional checking
Probable cause
Overshooting of position
P gain value of position controller
distinctly too high
Speed controller setting (servo
mode) inadequate (set I gain to
approx. 3%/ms, P gain to approx.
120%)
Drive oscillates about position
Too high a value set for P gain of
position controller
Drive moves into wrong direction
(away from setpoint position)
Sense of rotation of the absolute
encoder does not correspond to the
sense of rotation of the motor =>
set a negative multiplication value
in the relevant parameter
Load sagging after the enable
signal is invalidated (lifting gear)
No setpoint delay was set (control
parameter); with the servo mode =
OFF the controller must be dis-
abled immediately when the event
"final position reached" has
occurred