On-off switch, Wiring pcb, Debugging/self-stroking – Warren Controls PICV Series User Manual
Page 24: Wiring s2 switch setting, Pcb additional function, Debugging m, Eg.1, Eg.2, Err run ul dl al max min err run ul dl al max min, Installation manual device operation
ON-OFF SWITCH
With switch S3-7 OFF (Factory Default), the self-stroking button must be
pressed for self-stroking to start. With switch S3-7 ON, self-stroking starts
each time the actuator is powered up. If switch S3-7 is ON, self-stroking
may also be started by pressing the self-stroking button for greater than
3 seconds. It is recommended that switch S3-7 be OFF.
The self-stroking function must be completed in order to calibrate the
TR5000 actuator to the travel of a valve.
Position the actuator ON-OFF switch in the OFF position. Position switch
S3-7 in the OFF position. Warning: If switch S3-7 is ON, the actuator
will start self-stroking as soon as power is applied. The sudden
movement and application of force may result in damage to the
valve and personal injury. After assembling the TR5000 actuator to the
valve, connect the 220VAC power supply. Position the actuator ON-OFF
switch in the ON position. Then press the self-stroking button on the
PCB and hold (greater than 3 seconds) until the running light flashes
red (1Hz).
– Self-stroking starts
– The actuator stem extends to the lower travel limit; the
running light flashes red (1Hz).
– The actuator stem retracts to the upper travel limit; the
running light flashes red (1Hz).
– The travel limits are recorded in the CPU; self-stroking is
finished (total process takes approx.150 seconds). The
actuator and running light return to normal operation.
1
2
Prepare for assembling actuator, take down the fixed fitting,
and disentangle the clip.
Made the actuator’s stem is concentric with the valve's stem
and made these two connecting faces keep coinciding.
Then lock the two screws on the clip.
3
4
Pulling the fixed fitting to the groove and locking by two screws.
The status after assembled, face and back.
Remark: If the back side have threaded hole, then locking the
other screw on the back. If not, pass over this step.
Installation
Manual device operation
B
o
o
E
Y
B
o
o
E
Y
Take down the front cover, screw off the water
joint, for preparing wiring.
Make the wire through the water joint,
connect the wire to the terminal as required.
Fit on the water joint after wiring.
Install the front cover, screw the screw.
Front cover
through this hole
1
2
3
4
ERR
RUN
UL DL AL MAX MIN
ERR
RUN
UL DL AL MAX MIN
Connecting Sheet
TS-R5000220X12-E01-00
2
Φ
42mm max
Stroke
Mounting Orientation
Dimensions
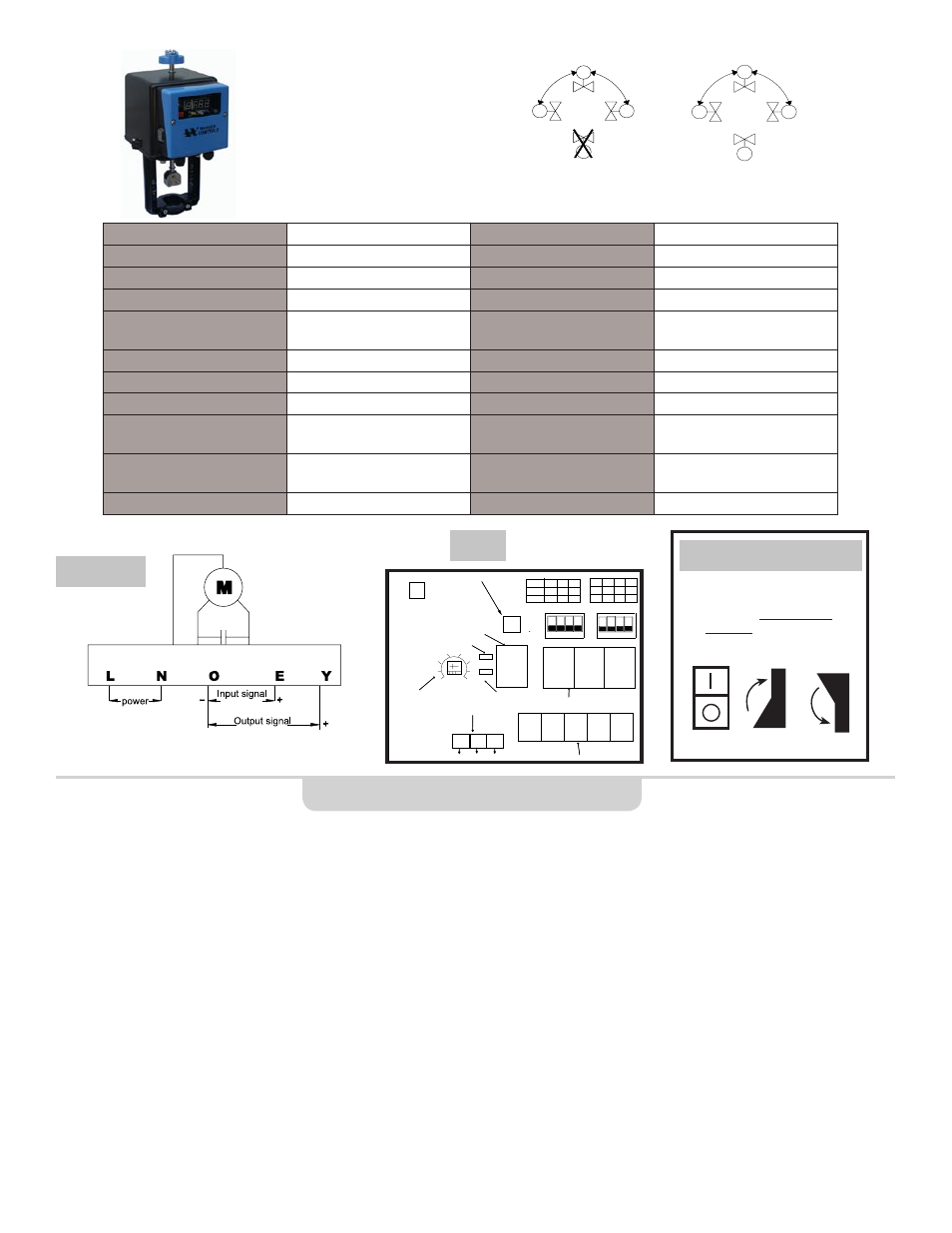
Chilled/hot water valve body Steam valve body
Forbidded downwards Random Orientation suitable
180°
360°
Power
switch
Knob
Crank
Shut off and prepare for manual operation
Pull out the crank and go round 180 degree
Press down the knob to limit position, keep press
and start to turn the crank.
1. Turn anticlockwise for actuator axes retracts;
2. Turn clockwise for actuator axes extends.
After finished the manual operation, release the knob,
and pull up the knob to the up limit position.
( Any release of press
is not allowed when
the crank running.)
1
2
3
4
TS-R5000220X12-E01-00
8
5
2
3
4
1
ON
OFF
S2
7
8
2
3
4
1
6
5
6
ON
OFF
S2
7
Eg.1
Wiring
S2 Switch setting
warning light
S2 switch
self-stroking button
S2
ERR
RUN
L
O
N
E
Y
ON
1 2 3 4
CPU
OFF
7 8
5 6
LOG
LIN
20%
0
1
2
S2
5 6
7 8
9 10
AL
MAX
MIN
II
UI
IO
UO
1
2
DA
RA
DW
UP
DF
RF
HS
LS
3
4
5
6
S1
running light
nixie tube
connection terminal
additional function terminal
1 2
3 4
UL
DL
--Running light (RUN): when actuator axes retracts, running light show red; when actuator axes extends, running light show green;
when do "self-stroking", running light flickering(1Hz).
---Warning light (ERR): when actuator have some problem, warning light will be lighting.
---Nixie tube: The first one is function bit, the second to forth are numerical bit
Description of Nixie tube:
Function bit
Description
Numerical bit
Description
A
Fault when do "self-stroking"
No show
/
C
Show Input signal on
Numerical bit
Number
between 0~100
Input signal (percent). For example, Input signal type is 0~10V, when input
signal is 1 V, there will be show 1/10*100=10
F
Show Output signal on
Numerical bit
Number
between 0~100
Output signal (percent). For example, Output signal type is 0~10V, when
output signal is 1 V, there will be show 1/10*100=10
When actuator running correctly, there will be show "C" or "F" alternate in the Nixie tube, it is means that "input signal" and "output signal"
be showed alternate.
---Additional function terminal:
1) Terminal 1,2 (UL): Up limit position SPDT output terminal(NO), when actuator axes retracts to limit position, this terminal will be close.
2) Terminal 3,4 (UL): Down limit position SPDT output terminal(NO), when actuator axes extends to limit position, this terminal will be close.
3) Terminal 5,6(UL): Fault SPDT input terminal(NO)when fault, this terminal will be close.
4) Terminal 7,8(MAX): Max. signal compulsory input terminal, this terminal is external connection SPDT, when close, means a Max. input
signal to actuator, and make the input signal from "O","E" terminal be of no effect.
5) Terminal 9,10(MIN): Min. signal compulsory input terminal, this terminal is external connection SPDT, when close, means a Min. input
signal to actuator, and make the input signal from "O","E" terminal be of no effect.
Notes:
1. Contact Capacity of SPDT: :1A (125VAC/30VDC)
2. Contact Capacity external connection SPDT: more than 50mA /30VDC
PCB
Additional function
8
5
2
3
4
1
ON
OFF
S2
7
8
2
3
4
1
6
5
6
ON
OFF
S2
7
S2
Switch
Function
Description
1
Flow character
ON
LOG: equal-percentage
OFF
LIN: equal-linear
2
Starting of input/
output signal
ON
20%:the starting input / output signal is 20% (namely 4~20mA or 2~10V)
OFF
0:the starting input / output signal is 0 (namely 0~20mA or 0~10V)
3
Type of input signal
ON
II: input current signal
OFF
UI: input voltage signal
4
Type of output
signal
ON
IO: Output current signal
OFF
UO: Output voltage signal
5
Operating mode
ON
DA:DA mode (when input signal is increasing, the actuator axes extends )
OFF
RA: RA mode (when input signal is increasing, the actuator axes retracts)
6
Losing input signal
mode
ON
DW: When lose input signal (voltage type), the minimum control signal
When lose input signal (current type), the minimum control signal
OFF
UP: When lose input signal (voltage type), the maximum control signal
When lose input signal (current type), the minimum control signal
7
Output signal mode
ON
DF: when the actuator axes retracts to limit position,output signal will be minimum value
when the actuator axes extends to limit position, output signal will be maximum value
OFF
RF: when the actuator axes extends to limit position, output signal will be minimum value
when the actuator axes retract to limit position, output signal will be maximum value
8
Sensitivity
ON
HS: the high sensitivity of input signal ≤1.5%
OFF
LS: the low sensitivity of input signal ≤2%
Input signal: 0~10VDC
Output signal: 0~10VDC
Operating mode: DA
Losing input signal mode:DW
Sensitivity of input signal ≤2%
Input signal: 4~20mA
Output signal: 4~20mA
Operating mode: DA
Losing input signal mode:DW
Sensitivity of input signal ≤2%
Eg.2
After assemblling TR5000-X...actuator with TL…,TW… or TF... valve body, connect AC 220V power supply. Then press down
"self-stroking" button on PCB over 3 seconds until the running light flickering:
– Self-stroking step starting
– The actuator moving to 1 (actuator axes retracts until up limit position), running light flickering
–The actuator moving to 0 (actuator axes extends until down limit position), running light flickering
– written the result in CPU, self-stoking step is finished ( total process need approx.180 seconds)
Remarks:
1. When in self-stroking, actuator can not be controlled by input singal.
Debugging
M
power
Input signal
Output signal
L N O E Y
Rating force
5000N
Input signal
0(2)~10VDC, 0(4)~20mA
Actual force
4500N~5500N
Output signal
0(2)~10VDC, 0(4)~20mA
Type of control
proportional
Voltage input impedance
>
100K
Power consumption
14VA
Current input impedance
<
0.50K
Motor
Synchronous motor with
permanent magentic
Voltage output load
>
1K
Nominal stroke
42mm
Current output load
<
0.5K
Running speed
2.5s/ mm (50Hz)
Up and down dead band
≤1.5%
Enviromental temperature -10~50℃ (Operation condition) Sensitivity
≤2%
Enviromental humidity
≤95% RH(40℃)
(Operation condition)
Material of bracket
Aluminum die casting
(surface anti-rust process)
IP Degree
IP54
Material of cover
Aluminum die casting
(surface anti-rust process)
Running mode
Up/ down straight travel
Net weight of product
6.0 Kg
1
with manual device
TR5000-X220-S.12
The TR5000 actuator has an
ON-OFF switch.
The switch must be in
the ON position for the
actuator to operate.
ON
OFF
Chilled/hot water application
Not suitable downwards
Steam application
All above suitable
WIRING
PCB
Notes:
1. See separate instruction for installation of TR5000 actuator on PICV valves.
2. When self-stroking, the actuator cannot be controlled by the input signal.
3. The self-stroking function must be repeated each time the type of input signal or output (feedback) signal is changed.
The PCB has an aperture potentiometer. DO NOT adjust the aperture potentiometer. The aperture potentiometer is factory set to 100. If the aperture
potentiometer is adjusted to less than 100, the valve will not function properly as a PICV
S1
self-stroking button
function digit
number digit
ERR
RUN
L
N
O
E
Y
connecting terminal
1 2
3
4
5
6
UL
DL
AL
auxiliary terminal
error light
running light
CPU
maximum
opening
aperture
potentiometer
2
3 4
1
ON
OFF
S2
2 3 4
1
S3
1
2
3
4
20%
0
II
UI
UI
II
IO
UO
5
6
7
8
DA
RA
DW
UP
DF
RF
HS
LS
S2
S3
30
40
50
60
70
80
90
100
220VAC
Rating force
5000N
Input signal
0(2)~10VDC, 0(4)~20MA
Actual force
4500~5500N
Output signal
0(2)~10VDC, 0(4)~20MA
Type of control
proportional
Voltage input impedance
>100K
Power consumption
12VA
Current input impedance
<0.167K
Motor
Synchronous motor with
permanent magnetic
Voltage output load
>1K
Nominal stroke
42mm, 51mm
Current output load
<0.5K
Running speed
3.57s/ mm (50Hz)
Up and down dead band
≤2.5%
Environmental temperature
-10~50ºC (Operation condition)
Sensititivity
low ≤2% high ≤1.5%
Environmental humidity
≤95% RH(40ºC)
(Operation condition)
Material of bracket
Aluminum die casting
(surface anti-rust process)
IP Degree
IP54
Material of cover
Aluminum die casting
(surface anti-rust process)
RUNNING MODE
Up/down straight travel
Net weight of product
5.2 Kg
DEBUGGING/SELF-STROKING
TR5000-X220S.12 / TR5000-X220-S.12-51