Overview, Sing the, Ackages – Teledyne LeCroy FlexRay Trigger, Decode and Physical Layer Test User Manual
Page 22: Haracterizing, Mbedded, Ontroller, Erformance
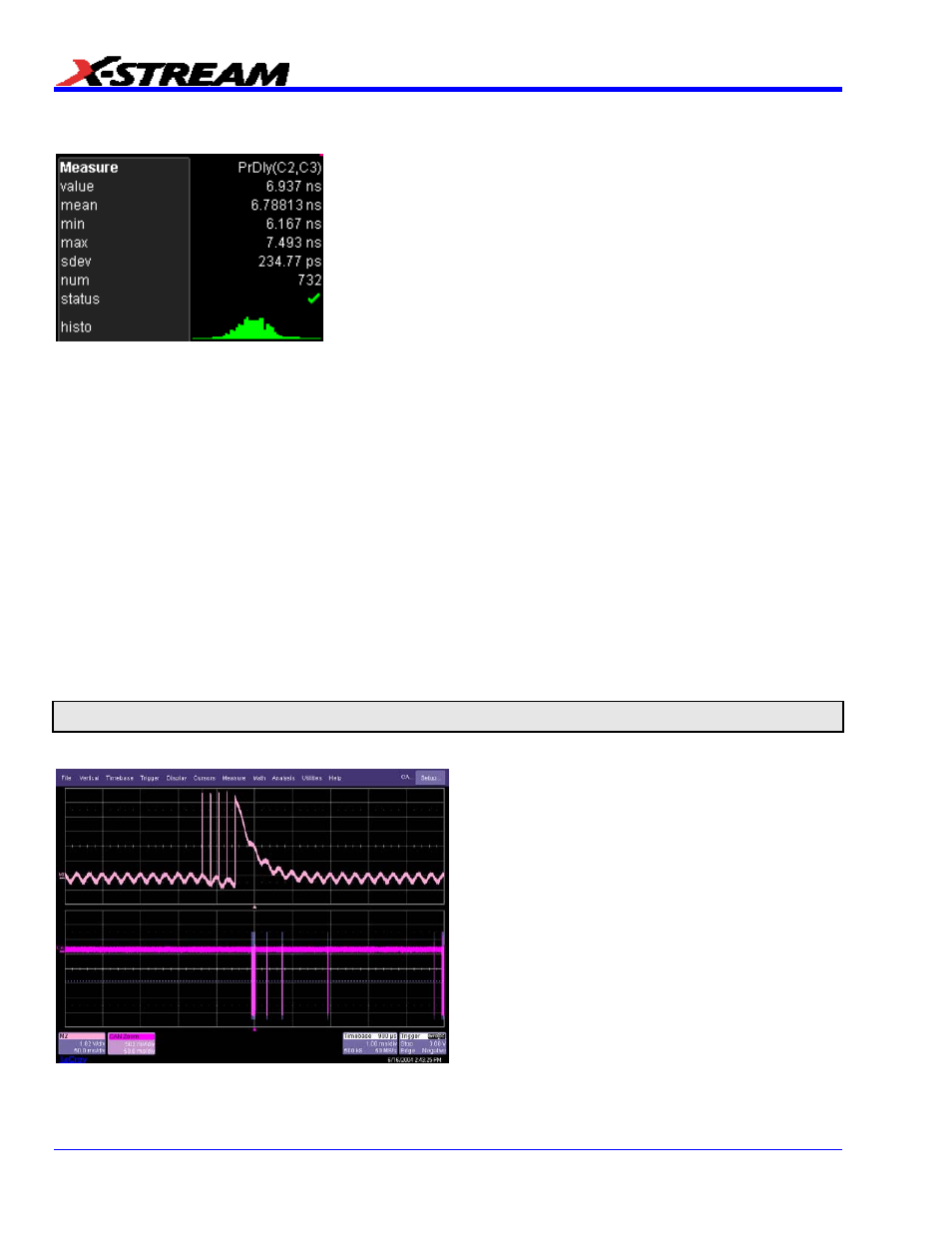
Just like other measurement parameters statistical information can be displayed and the results can be shown
visually in a histicon directly below the measured values.
FlexRay measurements can be selected as the source for track, trend or histogram functions. More detail on
these functions is described in a different section of this manual.
USING THE FLEXRAY PACKAGES: CHARACTERIZING EMBEDDED
CONTROLLER PERFORMANCE
Overview
The standard oscilloscope contains a number of built-in tools, such as cursors, measurement parameters, and
statistical analysis. These can be used to characterize performance for serial data signals just as they would be
used to characterize performance on any other signals. You may want to use cursors for making single-shot
timing measurements, and measurement parameters when you need to accumulate statistical data over many
different acquisitions. In addition, measurement parameters are also helpful to determine the underlying integrity
of the FlexRay physical signals.
FlexRay TDP, TD and D packages provide basic tools to characterize embedded controller performance. These
tools can be used on the decoded channels, memories, zooms, functions, etc. just like they are used on any
undecoded channels, memories, zooms, functions, etc. In addition, you can use normal Edge or SMART Triggers
on an analog channel input to trigger the oscilloscope when a certain analog signal occurs, and then measure to a
particular FlexRay frame using the decoded info as your guide.
Note: The examples shown below are using CAN bus messages, but the included oscilloscope tools described in the following sections can
be applied in the same way.
For instance, take the example below of an analog signal creating a burst of CAN messages.
This data was acquired over a 500 ms duration. It is likely that you want to understand whether the analog signal
input to your electronic control unit (ECU) is creating the desired CAN message output from the ECU. There are a
number of ways that this could be done.
22
FlexRay-TDP-OM-E Rev A