3 automatic minimization of static unba- lance, 5 when and why matching, English – CEMB USA C73-L SE (B) User Manual
Page 16
16
s
sx
x
g
g
g
g
d
dx
x
5
50
0°°
s
sx
x
g
g
g
g
d
dx
x
4
4 g
g
3
3 g
g
1
1 g
g
6
6 g
g
s
sx
x
g
g
g
g
d
dx
x
s
sx
x
g
g
g
g
d
dx
x
s
sx
x
g
g
g
g
d
dx
x
Use and maintenance manual Rev. 10-2009
ENGLISH
5.4.3 Automatic minimization of static unba-
lance
This program is designed to improve the quality of balancing
without any mental effort or loss of time by the operator. In
fact by using the normal commercially available weights, with
pitch of 5 in every 5 g, and by applying the two counterweights
which a conventional wheel balancer rounds to the nearest
value, there could be a residual static unbalance of up to 4
g. The damage of such approximation is emphasized by the
fact that static unbalance is cause of most of disturbances
on the vehicle. This new function, resident in the machine,
automatically indicates the optimum entity of the weights
to be applied by approximating them in an “intelligent” way
according to their position in order to minimize residual static
unbalance.
5.5
WHEN AND WHY MATCHING
The software associated with eccentricity measurement is
a powerful tool for determining the need to perform relative
rotation between the rim and tyre in order to reduce the eccen-
tricity of the wheel down to acceptable limits. The principle
adopted is based on the consideration that a rim with acceptable
tolerance, mounted with an acceptable tyre, can statistically
generate a total eccentricity which is not acceptable but can
be improved by matching.
Generally speaking, rim measurement is not necessary,
accurate or useful because:
To measure the rim it is necessary to remove the tyre.
▪
There can by coarse errors on the outside (e.g. alumi-
nium wheels!)
The two rim sides can be eccentric in a very different
▪
way. Therefore to which one to make reference? What
is the effect on the tyre mounted?
To improve the eccentricity of a wheel,
▪
the rim should be
eccentric, to compensate the tyre. And viceversa.
If after a rotation by 180° of a wheel, the value is still
▪
out-of-tolerance, either the tyre or rim are too eccentric:
One of the two must be replaced!
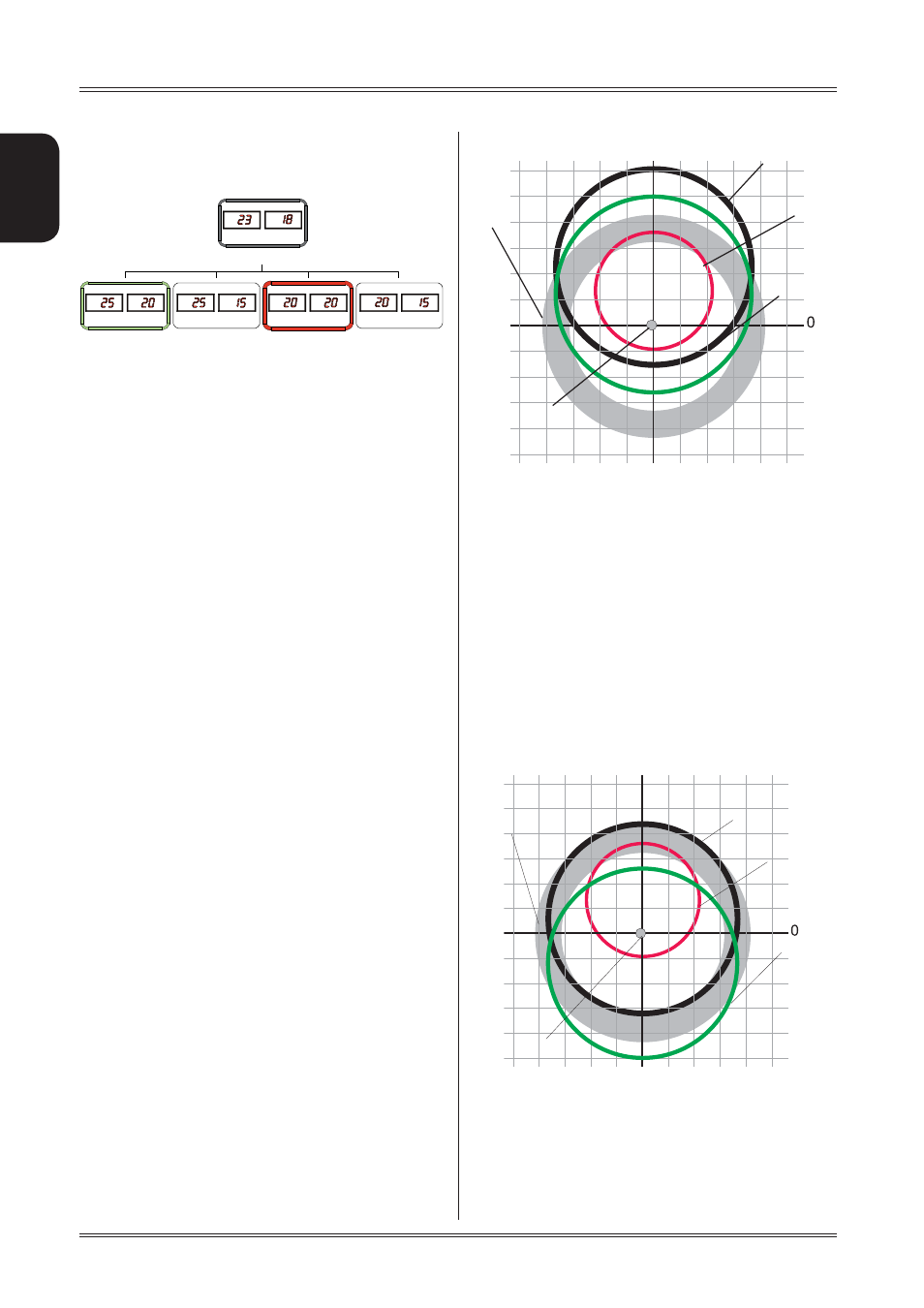
SOLUTION: Rotate the tyre on the rim by 180°
RESULT: wheel eccentricity 0.3 - 0.4 mm (in tolerance)
wheel
rim
tyre
rotation axle
Ideal wheel
Example 1
Rim + 0.8 mm
Tyre + 0.6 mm
Wheel + 1.3 mm
Eccentricity of the wheel is excessive, due to an acceptable
rim or tyre but randomly placed in an “unfortunate” relative
position.
Example 2
Rim + 0.8 mm
Tyre - 0.6 mm
Wheel + 0.3 mm
Eccentricity of the single items has been compensated.
The wheel is acceptable.
Initial unbalance
phase shift
Possible approximations
residual static
residual static
residual static
Choice with minimum
static residual
With conventional
wheel balancer
residual static
Use of the wheel balancer