Rainbow Electronics MAX16064 User Manual
Page 30
MAX16064
±0.3% Accurate, Quad, Power-Supply Controller with
Active-Voltage Output Control and PMBus Interface
30
______________________________________________________________________________________
S
= START CONDITION
SR = REPEATED START CONDITION
P
= STOP CONDITION
= SLAVE TRANSMISSION
COMMAND
BYTE FOR
DEVICE 1
DATA BYTES
FOR DEVICE 1
SLAVE
ADDRESS OF
DEVICE 1
COMMAND BYTE
FOR DEVICE n: NO
DATA BYTE
SLAVE
ADDRESS OF
DEVICE n
COMMAND
BYTE FOR
DEVICE 2
DATA BYTES
FOR DEVICE 2
SLAVE
ADDRESS OF
DEVICE 2
COMMAND
BYTE FOR
DEVICE 3
DATA BYTES
FOR DEVICE 3
SLAVE
ADDRESS OF
DEVICE 3
DATA0
A
DATA1
A
8 BITS
8 BITS
S
ADDR1
W A
CMD1
A
7 BITS
8 BITS
SR
ADDRn
W A
CMDn
A
7 BITS
8 BITS
DATA0
A
8 BITS
SR
ADDR2
W A
CMD2
A
7 BITS
8 BITS
DATA0
A
DATA1
A
8 BITS
8 BITS
SR
ADDR3
W A
CMD3
A
7 BITS
8 BITS
PEC1
8 BITS
A
DATA1
A
8 BITS
PEC2
8 BITS
A
PEC3
8 BITS
A
PECn
8 BITS
A
P
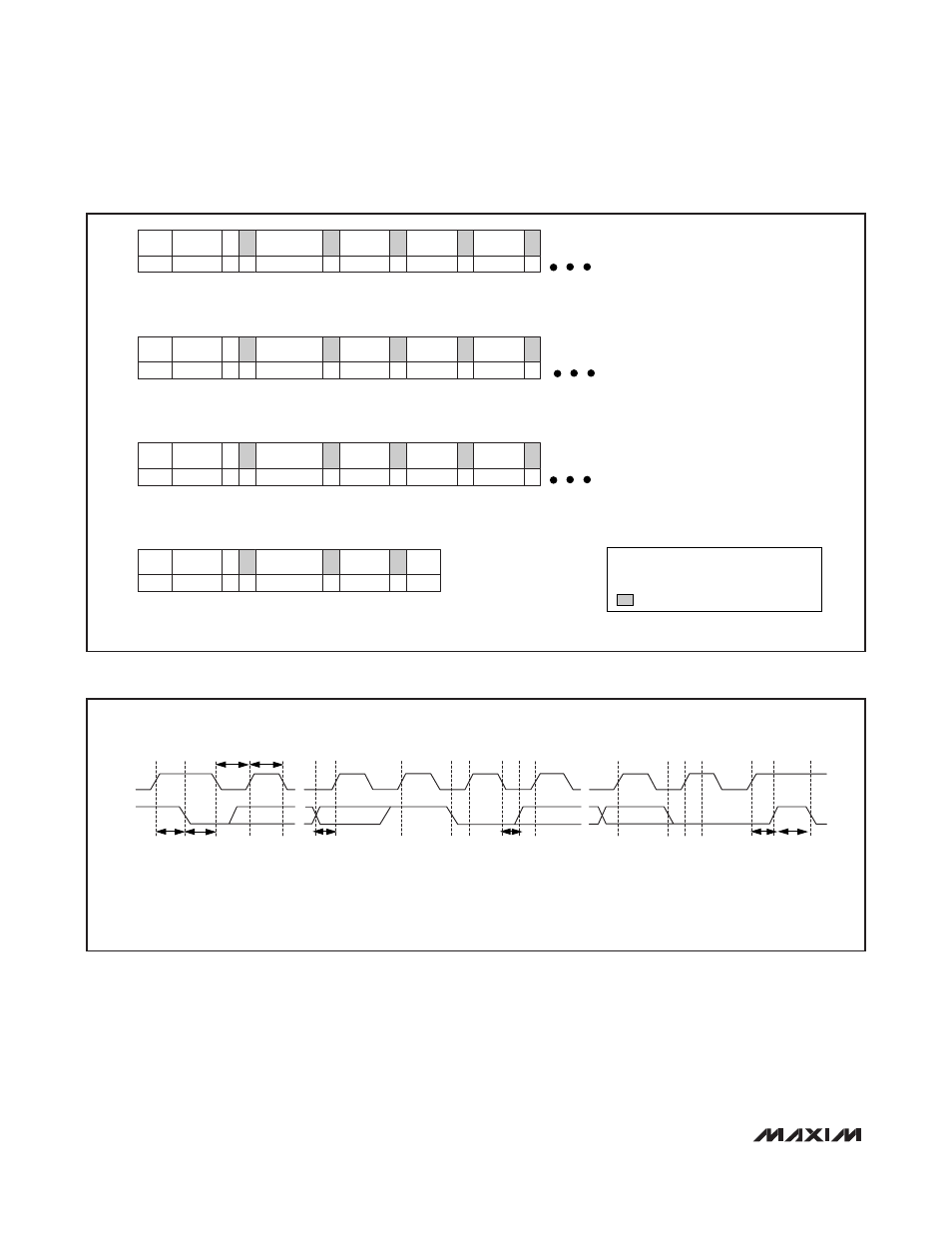
Figure 15. SMBus Group Command Protocol with PEC
SCL
SDA
A
A = START CONDITION
B = MSB OF ADDRESS CLOCKED INTO SLAVE
C = LSB OF ADDRESS CLOCKED INTO SLAVE
D = R/W BIT CLOCKED INTO SLAVE
E = SLAVE PULLS SDA LINE LOW
F = ACKNOWLEDGE BIT CLOCKED INTO MASTER
G = MSB OF DATA CLOCKED INTO MASTER
H = LSB OF DATA CLOCKED INTO MASTER
I = MASTER PULLS SDA LINE LOW
J = ACKNOWLEDGE CLOCKED INTO SLAVE
K = ACKNOWLEDGE CLEAR PULSE
L = STOP CONDITION
M = NEW START CONDITION
B
C
D
E
F
G
H
I
J
K
L
M
t
SU;STA
t
HD;STA
t
SU;DAT
t
HD;DAT
t
SU;STO
t
BUF
t
LOW
t
HIGH
Figure 16. SMBus Write Timing Diagram