4 motion mode, Pq r – GLOBALSAT TR-203A User Manual
Page 48
47
6.4 Motion Mode
Motion mode is an economic report mode. Under motion mode, TR-203 will
report its location with high frequency when TR-203 detects motion
(moving state). When TR-203 is static, it will report its location with low
frequency (static state). It can save the report-transmission fee. Between
the moving state and static state, there is a validation state for TR-203 not
to jump to static state as soon as it does not detect motion. You could set
TR-203 keep in moving state by setting a traveled distance (RE) within a
defined interval (RF).
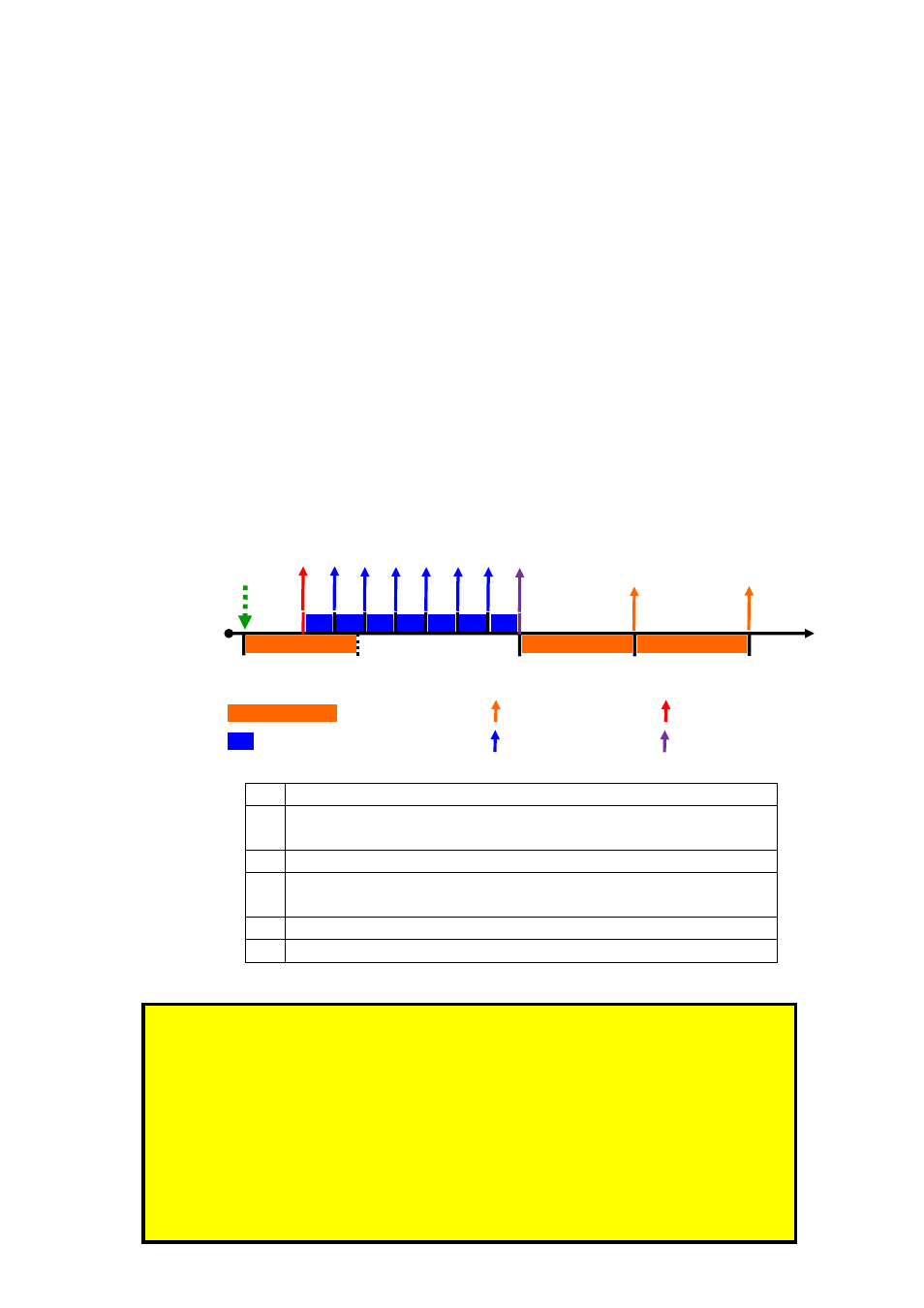
There are 2 report frequency of motion mode, one is when TR-203 detects
motion, and the other is when TR-203 is static. The behavior is as following:
n
Receive command and then enter motion static mode.
o
When TR-203 detects motion, it will enter motion moving mode and
send “static to moving” report.
p
Motion Moving Report.
q
When TR-203 is static, it will send “moving to static” report and then
return to the motion static mode.
r
Re-start timer for motion static interval.
s
Motion Static Report.
n
o
p
q
r
Time
R0 (Static interval)
R1 (Moving interval)
(Static Report)
(Moving Report)
(Static to Moving Report)
(Moving to Static Report)
s
Note of Traveled Distance:
You can also set a traveled distance, and then TR-203 will report by the
combination of report interval and traveled distance.
For example, the report interval is 60 seconds, the traveled distance is 800
meters, TR-203 sends 1 report at 10:00:00, and then it detects the traveled
distance is over 800 meters at 10:00:50, it will send out one report and
re-start to count the report interval and the traveled distance. The next report
will be sent out at 10:01:50 or when the traveled distance is over 800 meters.