Tascam SS-R1 User Manual
Page 7
TASCAM SS-R1/SS-CDR1 RS-232C Protocol Specification
6
TEAC
Corporation
Command sequence
In most cases the controlled device will not send an ACK in response to transport control or data preset
commands sent from the external controller.
The controlled device will send back a return command in response to data sense commands that
request a data value specified on the controlled device.
When the status of the controlled device changes, such as from Stop to Play mode, or when an error etc.
occurs, the controlled device will send a command indicating this to the external controller.
Examples of the command sequence are given below.
You must leave an interval of at least 20 ms between commands.
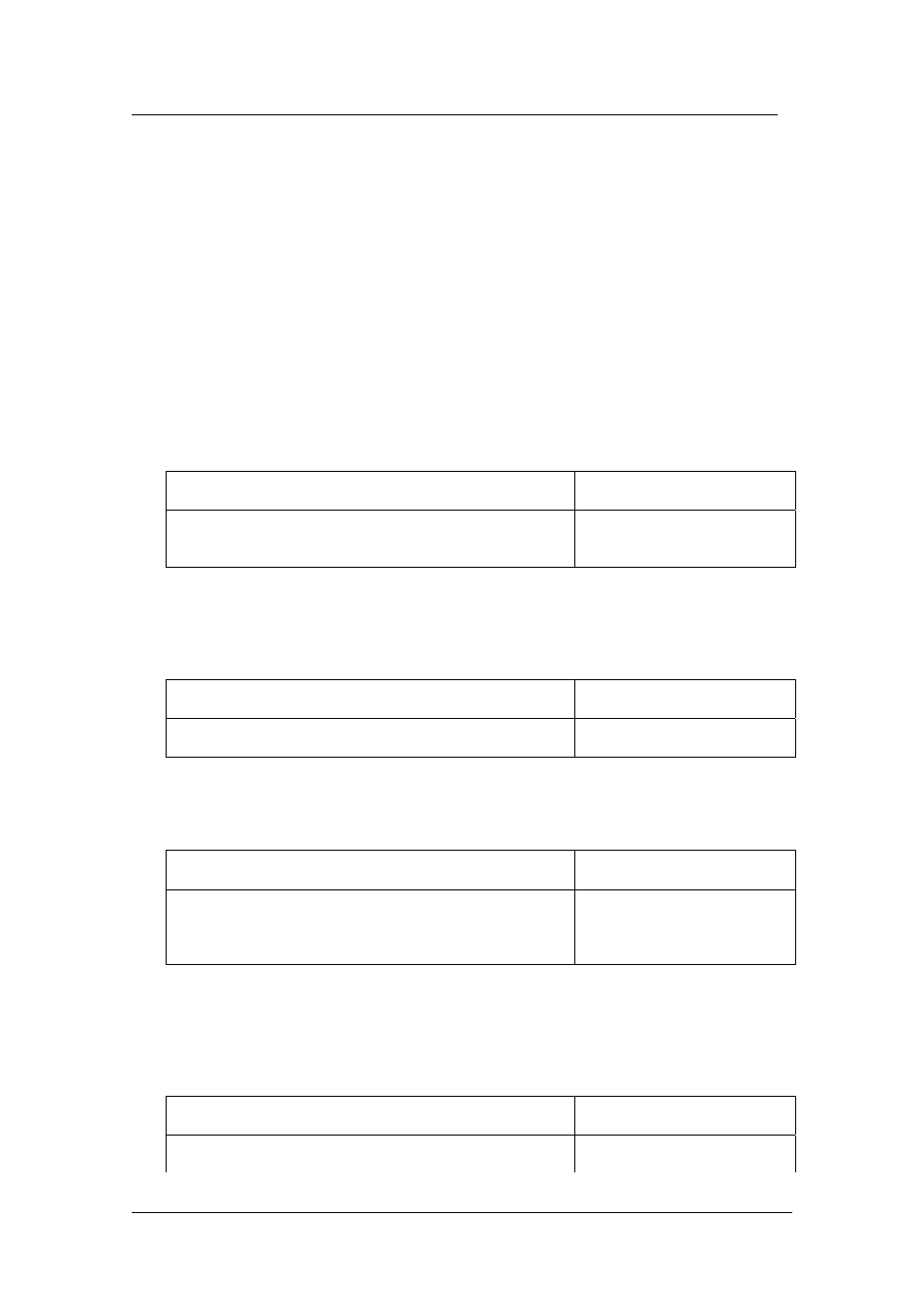
Example 1:
Controlling the transport of the controlled device
This example describes the Play operation.
When the controlled device receives the PLAY command and enters Play mode, it will transmit
a CHANGED STATUS command.
ACK is not transmitted for the PLAY command.
Command
External controller
Controlled device
State of controlled device
Stopped
PLAY ->
<- CHANGED STATUS
Transmit when starting Play
Example 2:
Presetting data
This example describes setting the AUTO CUE LEVEL.
When the controlled device receives the AUTO CUE LEVEL PRESET (Preset) command, it will
set its AUTO CUE LEVEL.
ACK is not transmitted for this command.
Command
External controller
Controlled device
State of controlled device
AUTO CUE LEVEL
PRESET (Preset -54dB)
->
AUTO CUE LEVEL set to
-54dB
Example 3:
Obtaining specified data
This example describes obtaining the currently-set AUTO CUE LEVEL.
When the controlled device receives the AUTO CUE LEVEL PRESET (Sense) command, it will
return the currently-set AUTO CUE LEVEL.
Command
External controller
Controlled device
State of controlled device
AUTO CUE LEVEL
PRESET (Sense)
->
<-
AUTO CUE LEVEL
RETURN
Example 4:
Checking the status of the controlled device, and performing the next operation
When the operating status of the controlled device changes, it will transmit CHANGED
STATUS. By using CHANGED STATUS as a trigger for sending MECHA STATUS SENSE, the
new operating status can be determined.
This example shows how to check the record-ready status of the controlled device and then
initiate recording.
Command
External controller
Controlled device
State of controlled device
Stopped
RECORD (Record Ready)
->