4 post processing, 1 averaging, Operation – RayTek MI Miniature Infrared Sensor User Manual
Page 46: 38 mi 6.4 post processing
Operation
38
MI
6.4 Post Processing
6.4.1 Averaging
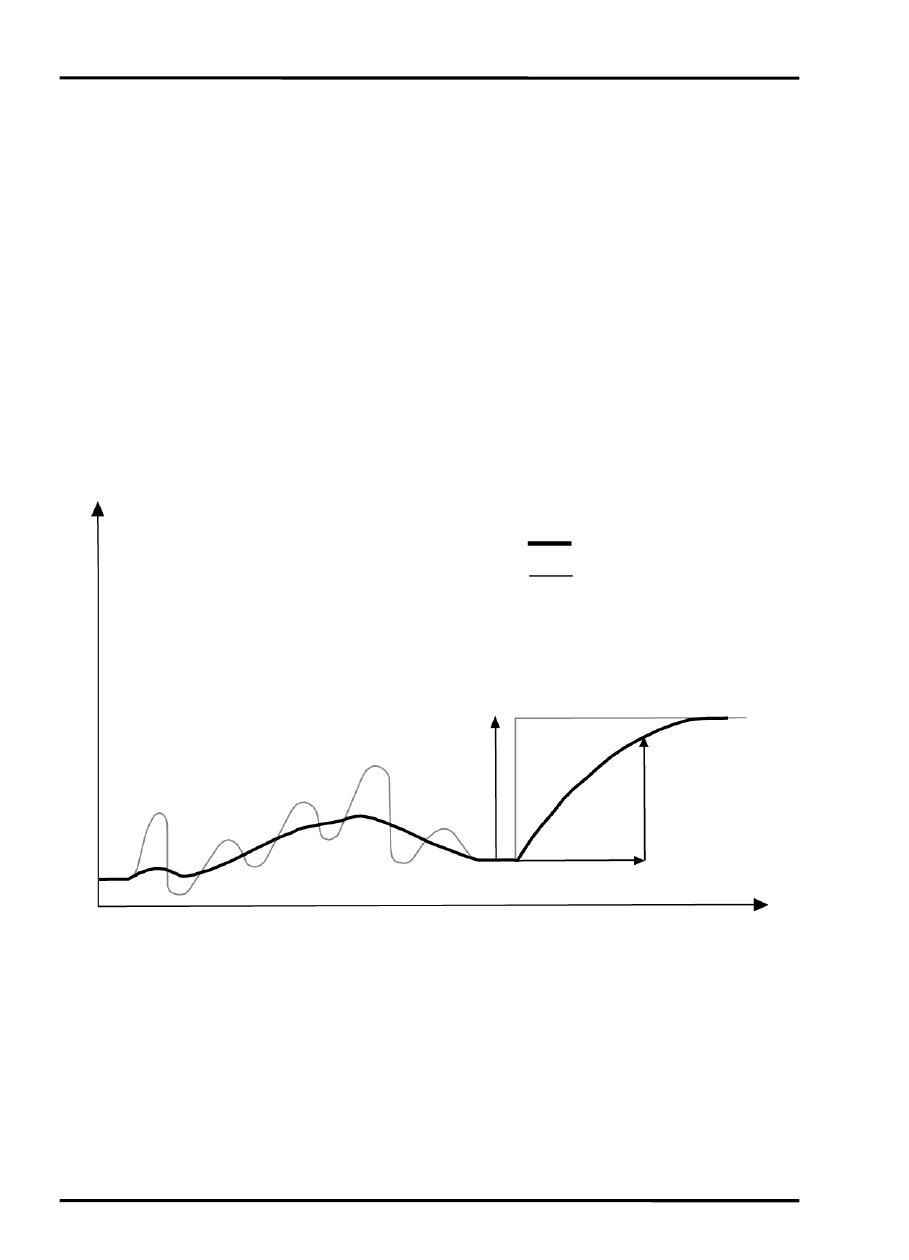
Averaging is used to smooth the output signal. The signal is
smoothed depending on the defined time basis, whereby the output
signal tracks the detector signal with significant time delay but noise
and short peaks are damped. Use a longer average time for more
accurate damping behavior. The average time is the amount of time
the output signal needs to reach 90% magnitude of an object
temperature jump.
Figure 25: Averaging
A low level input (GND) at external input FTC3 will promptly
interrupt the averaging and will start the calculation again.
Attention: The disadvantage of averaging is the time delay of the
output signal. In case of having a temperature jump at the input (hot
output temperature
object temperature
temperature jump
average time
Temp
Time
90% of
temperature
jump