Recommended tuning settings, Optimizing autotrac controller performance – John Deere AUTOTRAC OMPFP11320 User Manual
Page 57
GS3 2630 Advanced Settings
CF86321,000027C -19-16MAY11-1/1
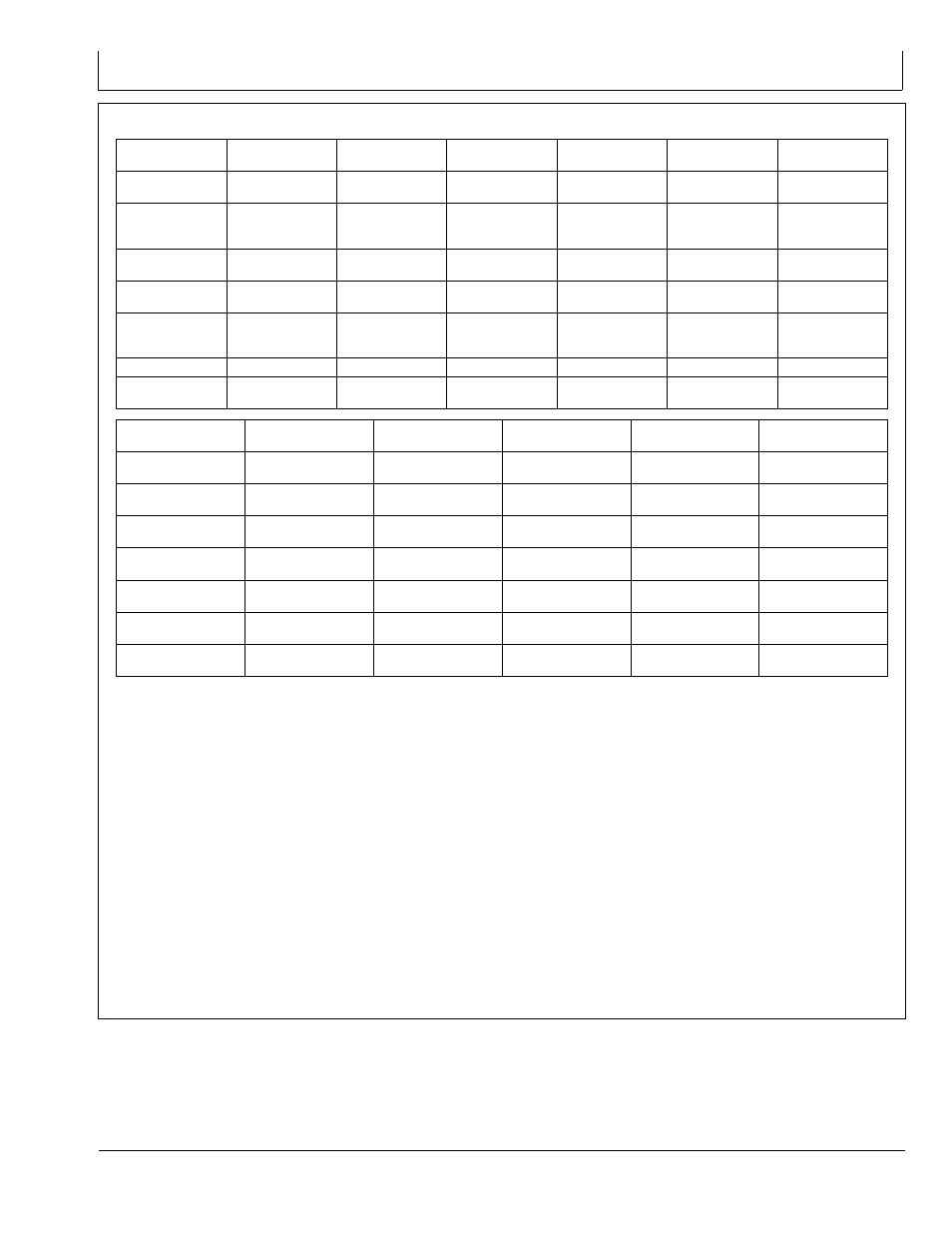
Recommended Tuning Settings
Settings
Factory Defaults
Min Value
Max Value
Excessive Wheel
Motion
Aggressive S-ing
Motion
Lazy S-ing Motion
Overall Steering
Sensitivity
70
50
200
100
100
100
Line Sensitivity
Heading
100
50
200
100-Decrease as
necessary
80-Decrease as
necessary (start
here)
100-Increase as
necessary (start
here)
Line Sensitivity
Tracking
100
50
200
100
100
100-Increase as
necessary
Heading Lead
100
50
130
90
90-Decrease as
necessary
90
Steering
Response Rate
100
50
200
80-Decrease as
necessary (start
here)
100
100-Increase as
necessary
Curve Sensitivity
70
50
200
100
100
100
Acquire
Sensitivity
100
50
200
100
100
100
Settings
Wandering S-ing
Motion
Lazy Line
Acquisitions
Aggressive Line
Acquisitions
Lazy Curve Track
Performance
Aggressive Curve
Track Performance
Overall Steering
Sensitivity
100
100
100
100
100
Line Sensitivity
Heading
100-Decrease as
necessary
100
100-Decrease as
necessary
100-Increase as
necessary
100-Decrease as
necessary
Line Sensitivity
Tracking
100-Increase as
necessary
150-Increase as
necessary
100-Decrease as
necessary
100
100
Heading Lead
100-Increase as
necessary (start here)
90
90
90-Increase as
necessary
90
Steering Response
Rate
100-Increase as
necessary
100
100
100-Increase as
necessary
100
Curve Sensitivity
70
100
100
110-Increase as
necessary (start here)
90-Decrease as
necessary (start here)
Acquire Sensitivity
100
120-Increase as
necessary (start here)
80-Decrease as
necessary (start here)
100
100
Most Common Conditions
1. Excessive Wheel Motion—Adjust Steering Response
Rate first before making any other adjustments. Turn
down this parameter until an acceptable amount of
wheel motion exists. Although it may be possible for
this parameter to be changed independently, you may
need to increase Line Sensitivity Heading and/or Line
Sensitivity Tracking (lateral) gains to compensate for
the wheel motion decrease. Keep in mind that forcing
this value too low may compromise AutoTrac accuracy
because this responsiveness determines how quickly
the system can compensate for off-track error. The
recommended Steering Wheel Speed setting should
be adjusted until there is slightly less wheel motion
than what is considered excessive by the operator.
2. Aggressive S-ing Motion—The two main
adjustments to address aggressive s-ing motion are
Line Sensitivity Heading and Heading Lead. Start
by increasing Heading Lead to enable the system to
look further ahead when making corrections. If this
is unsuccessful, the likely cause is overaggressive
Line Sensitivity Heading and this gain should then
be reduced. Forcing this gain low may require an
increase in the Line Sensitivity Tracking (Lateral) gain
to maintain the overall system performance at an
acceptable level.
3. Lazy S-ing Motion—This may be the most difficult
situation to address because the sluggish behavior
can be caused by field conditions or machine setup.
In some cases, tuning the gains may not achieve
the performance desired. Start by increasing Line
Sensitivity Tracking and check performance. If the
system remains sluggish, increase Line Sensitivity
Heading until the system begins to respond more
aggressively. If fine tuning is needed, the Steering
Response Rate can be adjusted accordingly,
increasing this value will make the system more
aggressive.
45-3
090811
PN=57