Profile position mode – Intelligent Motion Systems MDrive DSP-402 User Manual
Page 43
35
Part 2: DSP-402 Implementation
Section 6
Profile Position Mode
General Information
A
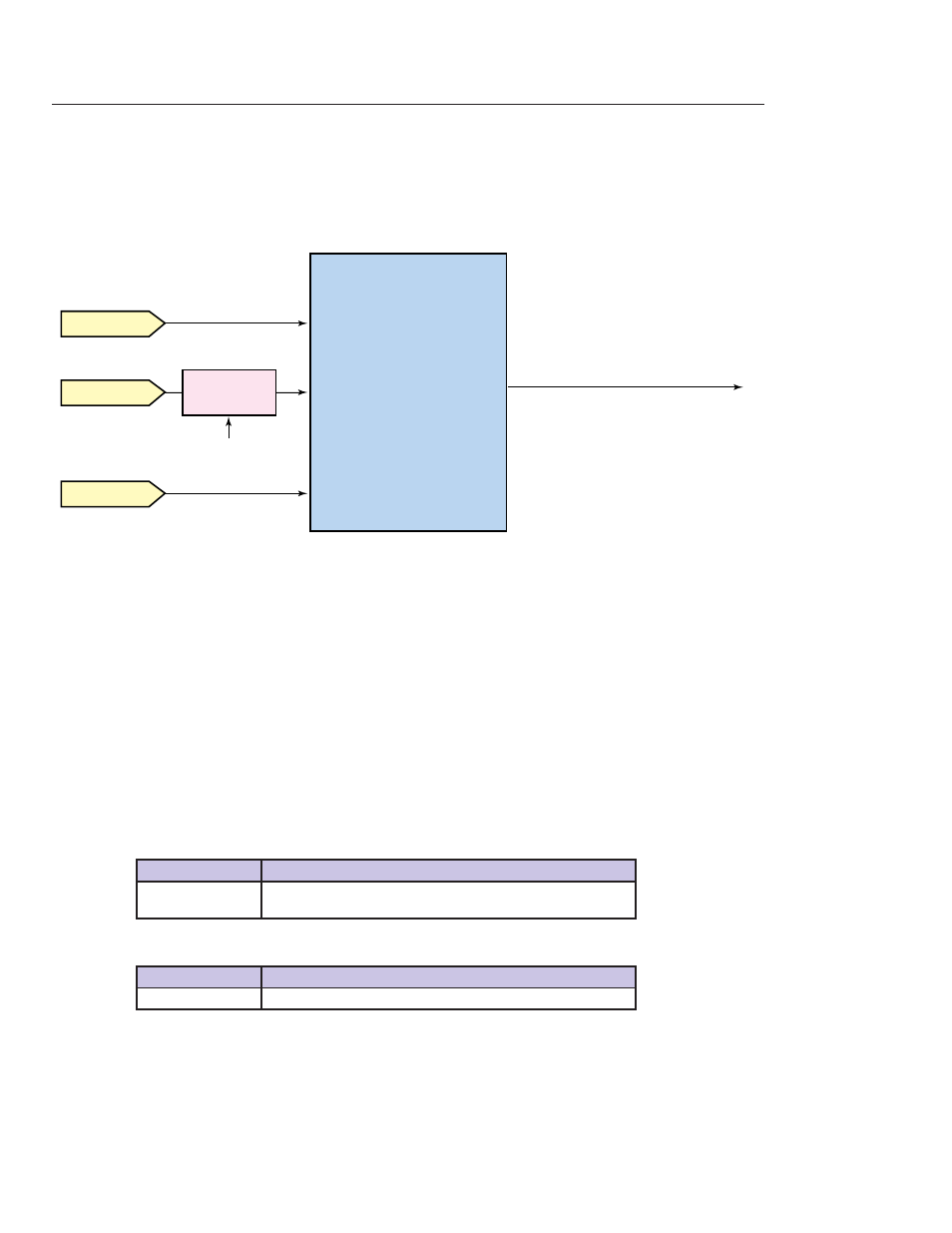
target_position is applied to the Trajectory Generator. It is generating a position_demand_value for the position control
loop described in the Position Control Function Section. These two function blocks are optionally controlled by individual
parameter sets.
At the input to the Trajectory Generator, parameters may have optional limits applied before being normalized to internal
units. Normalized parameters are denoted with an asterisk. The simplest form of a Trajectory Generator is just to pass through
a target_position and to transform it to a position_demand_value* with internal units (increments) only.
For the IMS MDrivePlus CANopen the following values apply:
target_position — microsteps
profile_velocity — microsteps/sec
end_velocity — microsteps/sec
profile_acceleration — microsteps/sec
2
profile_deceleration — microsteps/sec
2
position_demand_value — microsteps
Input Data Description
Operating Mode
Description
Profile Position
target_position, profile_velocity, end_velocity, profile_
acceleration, profile_deceleration
Output Data Description
Operating Mode
Description
Profile Position
position_demand_value
•
•
•
•
•
•
Trajectory Generator
Position
target_position (607Ah)
profile_velocity (6081h)
end_velocity (6082h)
profile_acceleration (6083h)
profile_deceleration (6084h)
Velocity
Acceleration
Multiplier
polarity (607Eh)
position_demand_value (60FCh)
Figure 6.1: Trajectory Generator Block Diagram
Note that the
MDrivePlus CANopen
is fixed at 256
microsteps/full motor
step or 51,200
microsteps per motor
revolution.