Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors MECHATROLINK-III Communications Reference User Manual
Page 364
10.1 List of Parameters
10-33
10
Ap
pend
ix
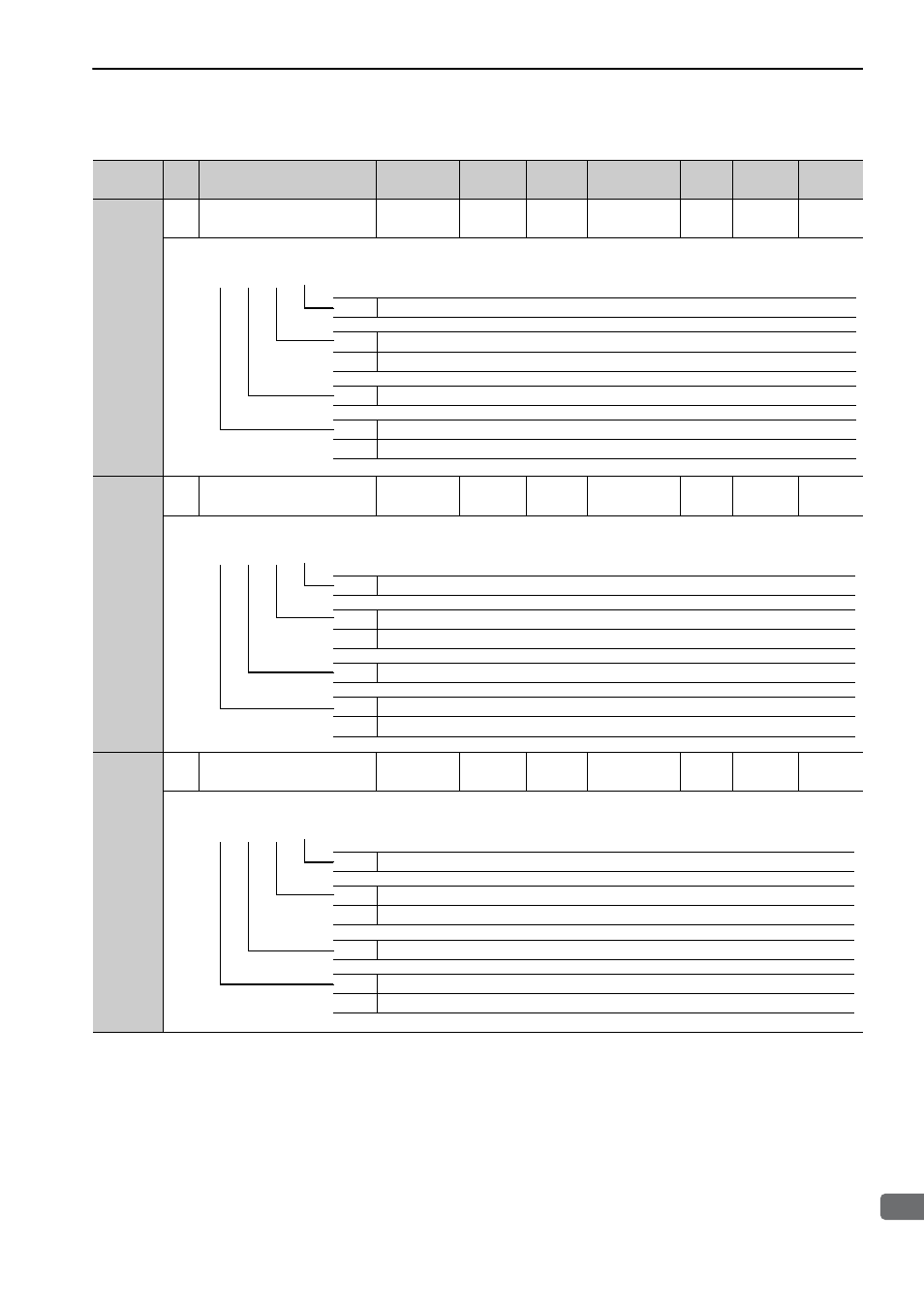
Pn860
2
SVCMD_IO (input signal
monitor) Allocation 1
0000 to 1717
–
0000
Immediately
Setup
M3
*9
–
Pn861
2
SVCMD_IO (input signal
monitor) Allocation 2
0000 to 1717
–
0000
Immediately
Setup
M3
*9
–
Pn862
2
SVCMD_IO (input signal
monitor) Allocation 3
0000 to 1717
–
0000
Immediately
Setup
M3
*9
–
∗9. This parameter is enabled only for MECHATROLINK-III standard servo profile.
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Profile
Reference
Section
0 to 7
Bit position of CN1-13 input terminal monitor
0
Disables bit allocation for CN1-13 input terminal monitor.
1
Enables bit allocation for CN1-13 input terminal monitor.
0 to 7
Bit position of CN1-7 input terminal monitor
0
Disables bit allocation for CN1-7 input terminal monitor.
1
Enables bit allocation for CN1-7 input terminal monitor.
4th 3rd 2nd 1st
digit digit digit digit
n.
0 to 7
Bit position of CN1-8 input terminal monitor
0
Disables bit allocation for CN1-8 input terminal monitor.
1
Enables bit allocation for CN1-8 input terminal monitor.
0 to 7
Bit position of CN1-9 input terminal monitor
0
Disables bit allocation for CN1-9 input terminal monitor.
1
Enables bit allocation for CN1-9 input terminal monitor.
4th 3rd 2nd 1st
digit digit digit digit
n.
0 to 7
Bit position of CN1-10 input terminal monitor
0
Disables bit allocation for CN1-10 input terminal monitor.
1
Enables bit allocation for CN1-10 input terminal monitor.
0 to 7
Bit position of CN1-11 input terminal monitor
0
Disables bit allocation for CN1-11 input terminal monitor.
1
Enables bit allocation for CN1-11 input terminal monitor.
4th 3rd 2nd 1st
digit digit digit digit
n.