Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors MECHATROLINK-III Communications Reference User Manual
Page 300
9 Troubleshooting
9.1.1 List of Alarms
9-4
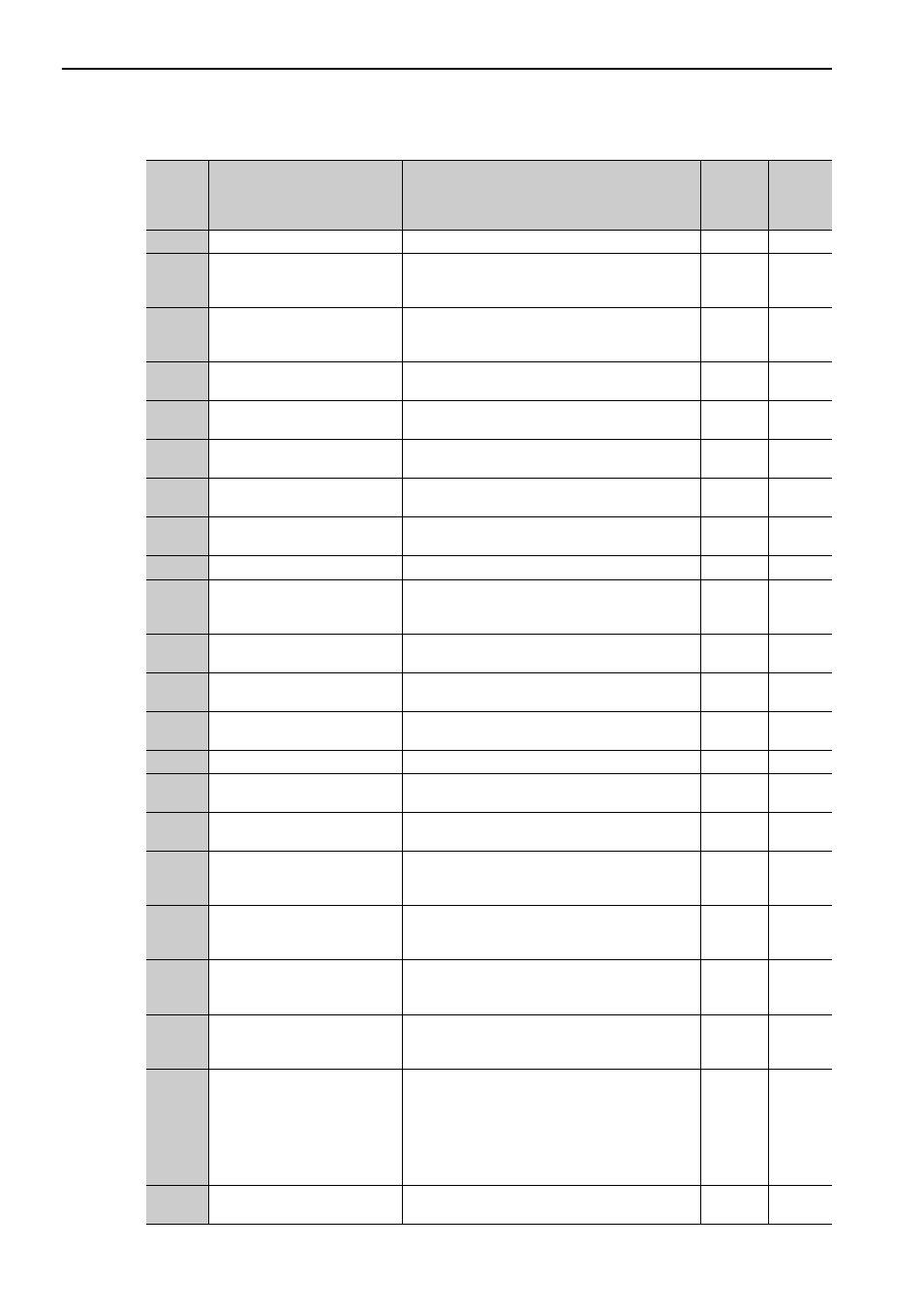
A.b33
Current Detection Error 3
The detection circuit for the current is faulty.
Gr.1
N/A
A.b6A
MECHATROLINK
Communications
ASIC Error 1
ASIC error occurred in the MECHATROLINK
communications.
Gr.1
N/A
A.b6b
MECHATROLINK
Communications
ASIC Error 2
ASIC error occurred in the MECHATROLINK
communications.
Gr.2
N/A
A.bF0
System Alarm 0
"Internal program error 0" of the SERVOPACK
occurred.
Gr.1
N/A
A.bF1
System Alarm 1
"Internal program error 1" of the SERVOPACK
occurred.
Gr.1
N/A
A.bF2
System Alarm 2
"Internal program error 2" of the SERVOPACK
occurred.
Gr.1
N/A
A.bF3
System Alarm 3
"Internal program error 3" of the SERVOPACK
occurred.
Gr.1
N/A
A.bF4
System Alarm 4
"Internal program error 4" of the SERVOPACK
occurred.
Gr.1
N/A
A.C10
Servo Overrun Detected
The servomotor ran out of control.
Gr.1
Available
A.C80
Absolute Encoder Clear
Error and Multiturn Limit
Setting Error
The multiturn for the absolute encoder was not
properly cleared or set.
Gr.1
N/A
A.C90
Encoder Communications
Error
Communications between the SERVOPACK and
the encoder is not possible.
Gr.1
N/A
A.C91
Encoder Communications
Position Data Error
An encoder position data calculation error occurred.
Gr.1
N/A
A.C92
Encoder Communications
Timer Error
An error occurs in the communications timer
between the encoder and the SERVOPACK.
Gr.1
N/A
A.CA0
Encoder Parameter Error
Encoder parameters are faulty.
Gr.1
N/A
A.Cb0
Encoder Echoback Error
Contents of communications with encoder are
incorrect.
Gr.1
N/A
A.CC0
Multiturn Limit Disagreement
Different multiturn limits have been set in the
encoder and the SERVOPACK.
Gr.1
N/A
A.CF1
Feedback Option Module
Communications Error
(Reception error)
Reception from the Feedback Option Module is
faulty.
Gr.1
N/A
A.CF2
Feedback Option Module
Communications Error
(Timer stop)
Timer for communications with the Feedback
Option Module is faulty.
Gr.1
N/A
A.d00
Position Error Overflow
Position error exceeded the value of excessive posi-
tion error alarm level (Pn520) when the servomotor
power is ON.
Gr.1
Available
A.d01
Position Error Overflow Alarm
at Servo ON
This alarm occurs if the servomotor power is turned
ON when the position error is greater than the set
value of Pn526 while the servomotor power is OFF.
Gr.1
Available
A.d02
Position Error Overflow Alarm
by Speed Limit at Servo ON
When the position errors remain in the error
counter, Pn529 limits the speed if the servomotor
power is turned ON. If Pn529 limits the speed in
such a state, this alarm occurs when position refer-
ences are input and the number of position errors
exceeds the value set for the excessive position
error alarm level (Pn520).
Gr.2
Available
A.d10
Motor-load Position Error
Overflow
During fully-closed loop control, the position error
between motor and load is excessive.
Gr.2
Available
(cont’d)
Alarm
Number
Alarm Name
Meaning
Servo-
motor
Stopping
Method
Alarm
Reset