Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors MECHATROLINK-III Communications Reference User Manual
Page 353
10 Appendix
10.1.2 Parameters
10-22
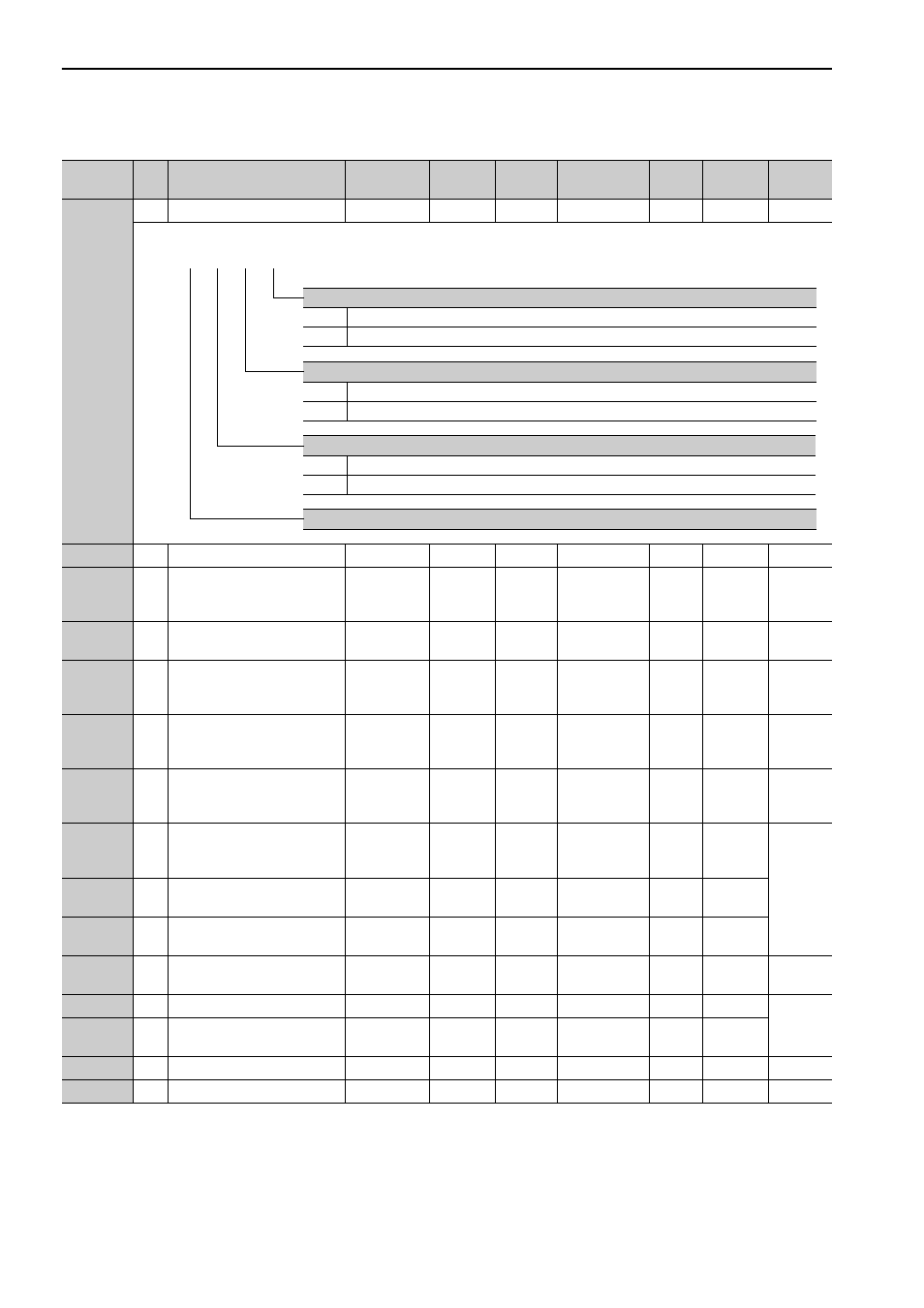
Pn512
2
Output Signal Inverse Setting 0000 to 0111
−
0000
After restart
Setup
−
3.3.2
Pn517
2
Reserved (Do not change.)
–
–
0000
–
–
−
–
Pn51B
4
Excessive Error Level
between Servomotor and
Load Positions
0 to
1073741824
1
reference
unit
1000
Immediately
Setup
−
8.3.6
Pn51E
2
Excessive Position Error
Warning Level
10 to 100
1%
100
Immediately
Setup
−
9.2.1
Pn520
4
Excessive Position Error
Alarm Level
1 to
1073741823
1
reference
unit
5242880
Immediately
Setup
−
5.1.4
9.1.1
Pn522
4
Positioning Completed Width
0 to
1073741824
1
reference
unit
7
Immediately
Setup
−
4.8.6
Pn524
4
NEAR Signal Width
1 to
1073741824
1
reference
unit
1073741824
Immediately
Setup
−
4.8.7
Pn526
4
Excessive Position Error
Alarm Level at Servo ON
1 to
1073741823
1
reference
unit
5242880
Immediately
Setup
−
5.1.4
Pn528
2
Excessive Position Error
Warning Level at Servo ON
10 to 100
1%
100
Immediately
Setup
−
Pn529
2
Speed Limit Level at Servo
ON
0 to 10000
1 min
-1
10000
Immediately
Setup
−
Pn52A
2
Multiplier per One Fully-
closed Rotation
0 to 100
1%
20
Immediately
Tuning
−
8.3.6
Pn52B
2
Overload Warning Level
1 to 100
1%
20
Immediately
Setup
−
4.3.8
Pn52C
2
Derating of Base Current at
Detecting Overload of Motor
10 to 100
1%
100
After restart
Setup
−
Pn52D
2
Reserved (Do not change.)
–
–
50
–
–
−
–
Pn52F
2
Reserved (Do not change.)
−
−
0FFF
−
−
−
–
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Profile
Reference
Section
Output Signal Inversion for CN1-1 or -2 Terminal
0
Does not inverse outputs.
1
Inverses outputs.
Output Signal Inversion for CN1-23 or -24 Terminal
0
Does not inverse outputs.
1
Inverses outputs.
Output Signal Inversion for CN1-25 or -26 Terminal
0
Does not inverse outputs.
1
Inverses outputs.
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.