0 related parameters and functions – Yaskawa Motion Control G7 Drive Software User Manual
Page 5
Date: 05/16/08, Rev: 08-05
Page 5 of 38
TM.G7SW.117
Function P1 – Motion Setup
Function P2 – Homing Setup
Function P3 – Advanced Motion Setup
Function P4 – Preset Position Setup
4.0
Related Parameters and Functions
4.1
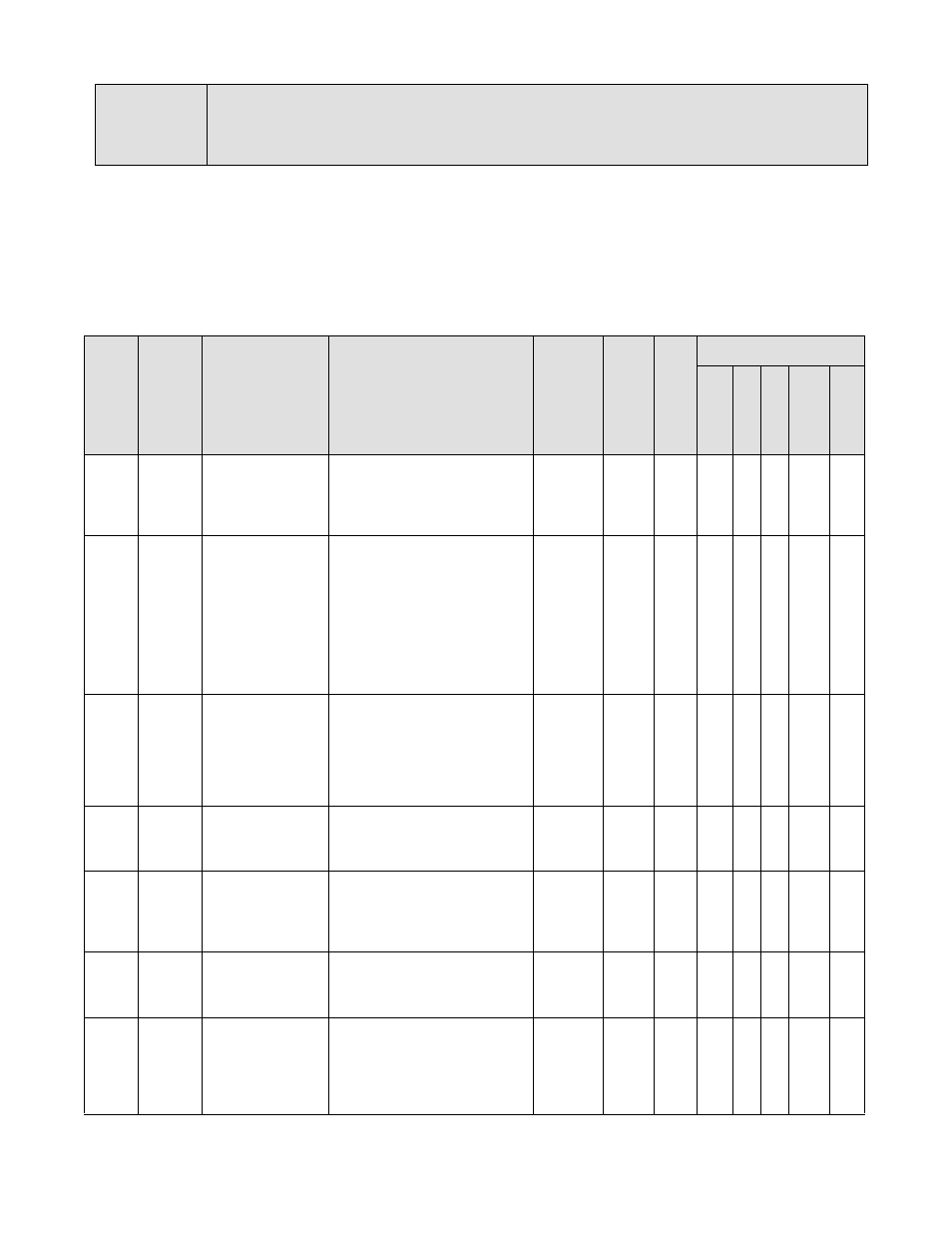
Parameters
Pa
ra
meter
Number
Mo
dbu
s
Ad
dr
es
s
Parameter
Name
Digital
Operator
Display
Description
Range
De
fa
ul
t
Ch
an
ge
During Run
Control Mode
V/f
V/f w/ PG
O.
L.
V.
Flu
x
Vector
O.
L.
V. 2
P1-01
600h
Motion Type
Motion Type
0: Disabled
1: Linear Absolute
2: Rotary Absolute
3: Relative Mem Off
4: Relative Mem On
0 ~ 4
0
N
-
-
-
A
-
P1-02
601h
Distance Select
Distance Select
0: Preset P4-XX
1: Modbus (061Ch and 061Dh)
(1)
2: Hi-Speed Option Card
Frequency Reference Register
(2)
A multifunction input selection
of “Distance Select” will
override this parameter.
3: Modbus 32-Bit (061Ch and
061Dh)
(3)
0 ~ 3
0
N
-
-
-
A
-
P1-03
602h
Move Command
Type
Move Cmd. Type
0: Maintained – Move command
must be maintained for the
entire move.
1: Rising Edge – Move command
is edge-triggered.
2: Falling Edge – Move command
is edge-triggered.
0 ~ 2
0
N
-
-
-
A
-
P1-04
603h
Positioning
Proportional Gain
Pos P Gain
Proportional gain used for the
position controller.
1.0 ~ 20.0
1.0
Y
-
-
-
A
-
P1-05
604h
Decel Start
Compensation
Distance
Decel Comp Dist
Starts the deceleration ramp early.
Increase if there is overshoot,
decrease if there is undershoot.
0 ~ 65535
cts
0
Y
-
-
-
A
-
P1-06
605h
Positioning Speed
Compensation
Pos Spd Comp
Provides fine adjustment for the
automatically calculated
positioning speed.
10.0 ~
200.0 %
100.0
Y
-
-
-
A
-
P1-07
606h
Triangle Move
Compensation
Trig Mov Comp
Determines response for a
triangular move. Increase if
overshooting, decrease if
undershooting when performing a
“Triangle” move instead of a
“Trapezoid” move.
0.0 – 10.0
1.0
Y
-
-
-
A
-