Yaskawa Motion Control G7 Drive Software User Manual
Page 12
Date: 05/16/08, Rev: 08-05
Page 12 of 38
TM.G7SW.117
(10)
An OPE03 error can be caused by many other conditions as well. These conditions are listed in Section 7 of the
G7 technical manual (TM.G7.01).
4.7
Multifunction Analog Input Settings (H3-05/H3-09)
Setting
Description
Digital Operator Display
20
Absolute Incremental Encoder Drive Disable. Used by the absolute incremental encoder to disable the drive when transferring
position information.
Ser Enc Drv Dis
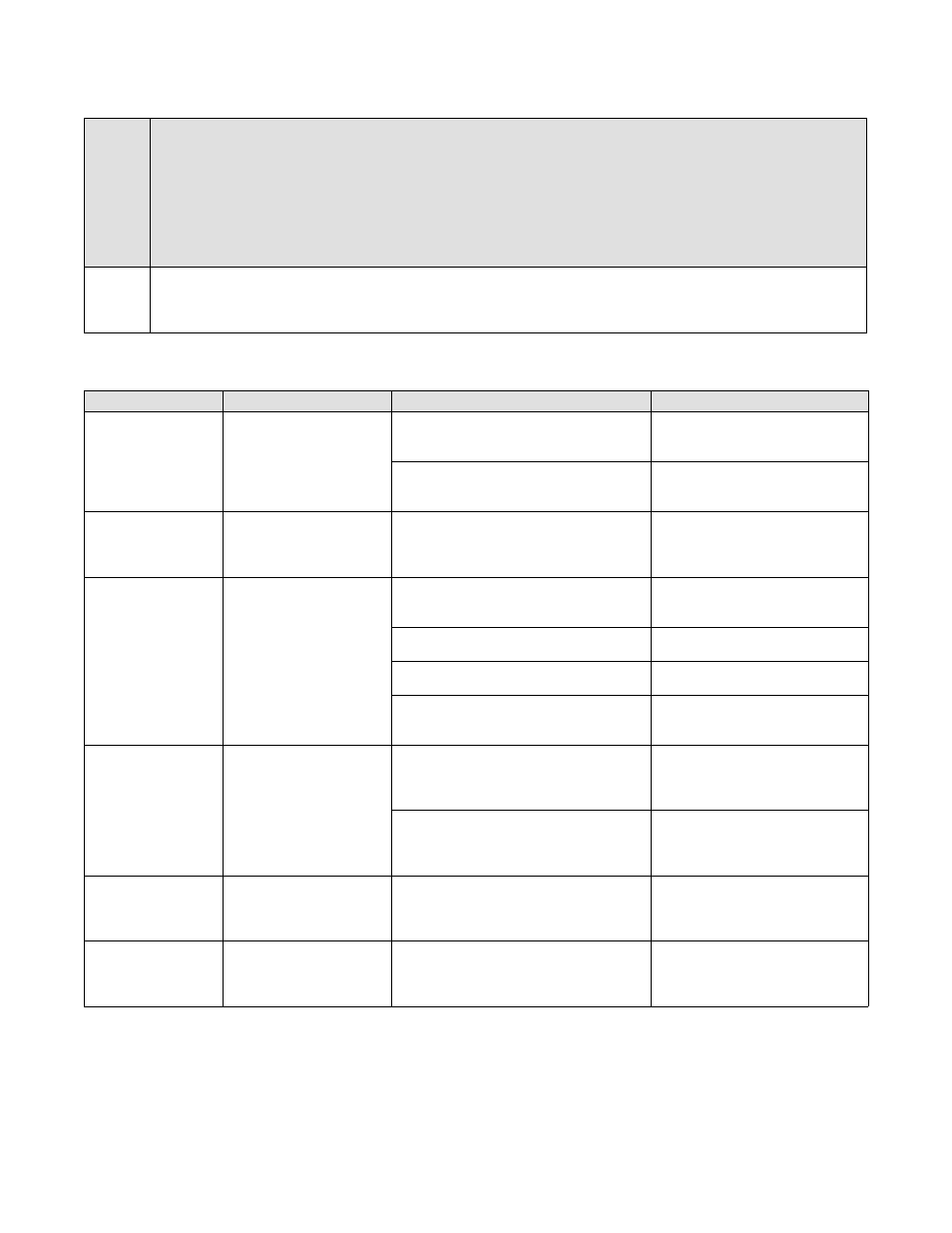
4.8
Faults
Fault Display
Description
Cause
Countermeasures
OPE03
Terminal
Multifunction Input
Selection Error
(10)
Motion control is enabled (P1-01 > 0) AND
3-wire control is enabled. (One of the H1
parameters is set to “0 – 3-Wire Control.”
Disable the motion control by setting
P1-01 = 0, or reprogram the H1
parameter that is set to “0.”
Motion control is enabled (P1-01 > 0) AND
Motor 2 Select is programmed into an H1
parameter.
Disable the motion control by setting
P1-01 = 0, or reprogram the H1
parameter that is set to “16.”
OPE05
Sequence Select
Option Card Selection Error
Distance Select is programmed for Option
Card Fref (P1-02 = 2) and no
communications option is installed at
connector 2CN.
Re-program parameter P1-02 or
install communications option board.
OPE12
Motion Ctrl Stup
Motion control setup error
Absolute Encoder is selected (P3-01 = 2)
and motion type is not “Linear Absolute”
(P1-01
≥
2).
Adjust motion type or encoder type.
Absolute Encoder is selected (P3-01 = 2)
and a DI-16H2 option board is not installed.
Adjust motion type or encoder type,
or install a DI-16H2 option board.
The numerator (P3-03) is set more than 100
times greater than the denominator (P3-04).
Adjust the numerator and the
denominator.
Encoder type is set to “Serial Abs Ch1” and
encoder rotation is set to CW. (P3-01 = 3
and F1-05 = 1)
Adjust parameter F1-05 back to zero
and change PG Ch.1 feedback
wiring.
2ENFL
Second Enc. Fault
There is a problem with the
encoder connected to either
the second channel of the
PG-W2 (Terminals 10
– 15) or with the absolute
encoder connected to the
DI-16H2.
Incremental encoder connected to the
second channel of the PG-W2 (Terminals 10
– 15) has opposite rotation from the motor
encoder.
Switch the polarity of the incremental
encoder connected to the second
channel by swapping terminals 10
and 11 on the PG-W2 card.
Absolute encoder has either “rolled over”
and no longer contains valid position data,
or has opposite rotation from the motor
encoder.
Mechanically reset the absolute
encoder, or force the encoder to
count in the opposite direction.
POSOF
Position Ovrflow
The internal register that
tracks position has
exceeded its limits during a
motion-control move.
The distance from home (or home + home
offset) has exceeded 10
9
encoder counts.
Re-home and verify position of
moving equipment.
SENCF
Ser Enc Fault
Absolute Incremental
Encoder Fault
The drive did not receive valid data / control
signals from the absolute incremental
encoder within 35 seconds after power up or
home command.
Check encoder and wiring. Check
that an analog input and output are
programmed and wired properly for
a absolute incremental encoder.