Yaskawa Motion Control G7 Drive Software User Manual
Page 11
Date: 05/16/08, Rev: 08-05
Page 11 of 38
TM.G7SW.117
(9)
When using either of the over-travel switches/inputs, it is STRONGLY recommended that the switch be
maintained beyond the trigger point of the switch, all the way to the end of the mechanical limit. If this cannot be
accomplished, an External Fault input is a better choice. If either of the over-travel inputs is used, it is
recommended that additional digital inputs be programmed to Jog Fwd or Jog Rev in order to jog the machine back
out of the over-travel condition.
Note:
See Section 2 of the G7 technical manual for a complete description of how to interface with the digital
input terminals. Be aware of different types of proximity switches (sinking or sourcing).
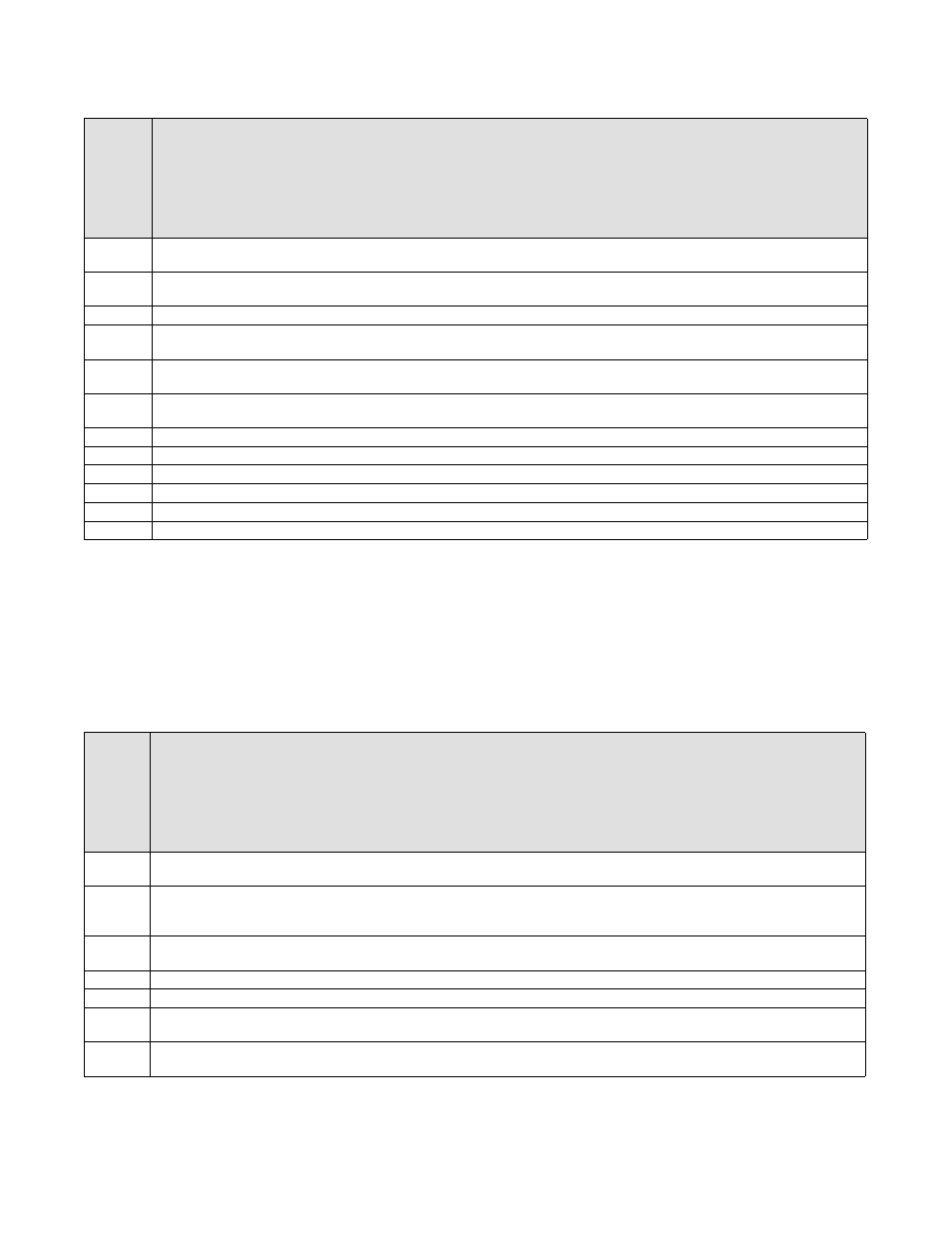
4.5
Multifunction Digital Input Settings (H1-XX)
Setting
Description
80
Move – Move to commanded position.
(For absolute rotary motion (P1-01 = 2), direction will always be forward.)
81
Move (Invert) – Move to commanded position * (-1).
(For absolute rotary motion (P1-01 = 2), direction will always be reverse.)
82
Home Command – Starts the homing sequence, must be maintained until “Home Complete” output comes on.
83
Home Switch – Indicates a “Home” or fixed position of the machine. Also used to indicate “Home” when using the “Manual”
homing routine (P2-01 = 6).
84
(9)
Positive Over-travel Limit Switch – Drive will ramp to zero speed and display “POSOT - Pos Ovr Travel.” Drive can be jogged but
no moves can be commanded. Re-homing is required (if applicable).
85
(9)
Negative Over-travel Limit Switch – Drive will ramp to zero speed and display “NEGOT - Neg Ovr Travel.” Drive can be jogged
but no moves can be commanded. Re-homing is required (if applicable).
86
Learn Position – Allows the storage of the current position. Must be maintained for 1 second.
87
Distance Select A – Used to select the commanded distance / move profile.
88
Distance Select B – Used to select the commanded distance / move profile.
89
Distance Select C – Used to select the commanded distance / move profile.
8A
Distance Select D – Used to select the commanded distance / move profile.
8B
Disable Motion Control NOTE: All position information is cleared, requiring another homing routine once re-enabled.
4.6
Multifunction Digital Output Settings (H2-XX)
Setting
Description
40
Move In Progress - Closed: Drive is completing the specified move profile. Deactivates at the end of a move when machine is
within the specified “in position” window AND the motor speed is below the DC Injection at start frequency (B2-01).
41
Move Complete - Closed: Move routine is complete and is within the specified “in position” window AND motor speed is below
the DC Injection start frequency.
Deactivates when the move command is removed. If a momentary move command is utilized
(P1-03 = 1 or 2), this output deactivates when another “move” command is given.
42
Homing Complete - Closed: A homing routine has been completed. Drive knows its position relative to the home switch, and has
moved to the home + home offset position (P2-06).
43
Homing Needed – Closed: A successful homing routine has NOT been completed.
44
At Home – Closed: The drive is within +/- the “in position” of home (home + home offset).
45
Learn Successful – Closes when the drive has successfully learned the present position. Opens when the learn command is
removed.
46
Pre-Action – Closes when distance from commanded destination is less than parameter P2-08. Opens when distance from
commanded destination is less than P1-08.