Appendix 3- parameter cross reference, Parameter name, Description or selection – Yaskawa GPD506/P5 to P7 User Manual
Page 44
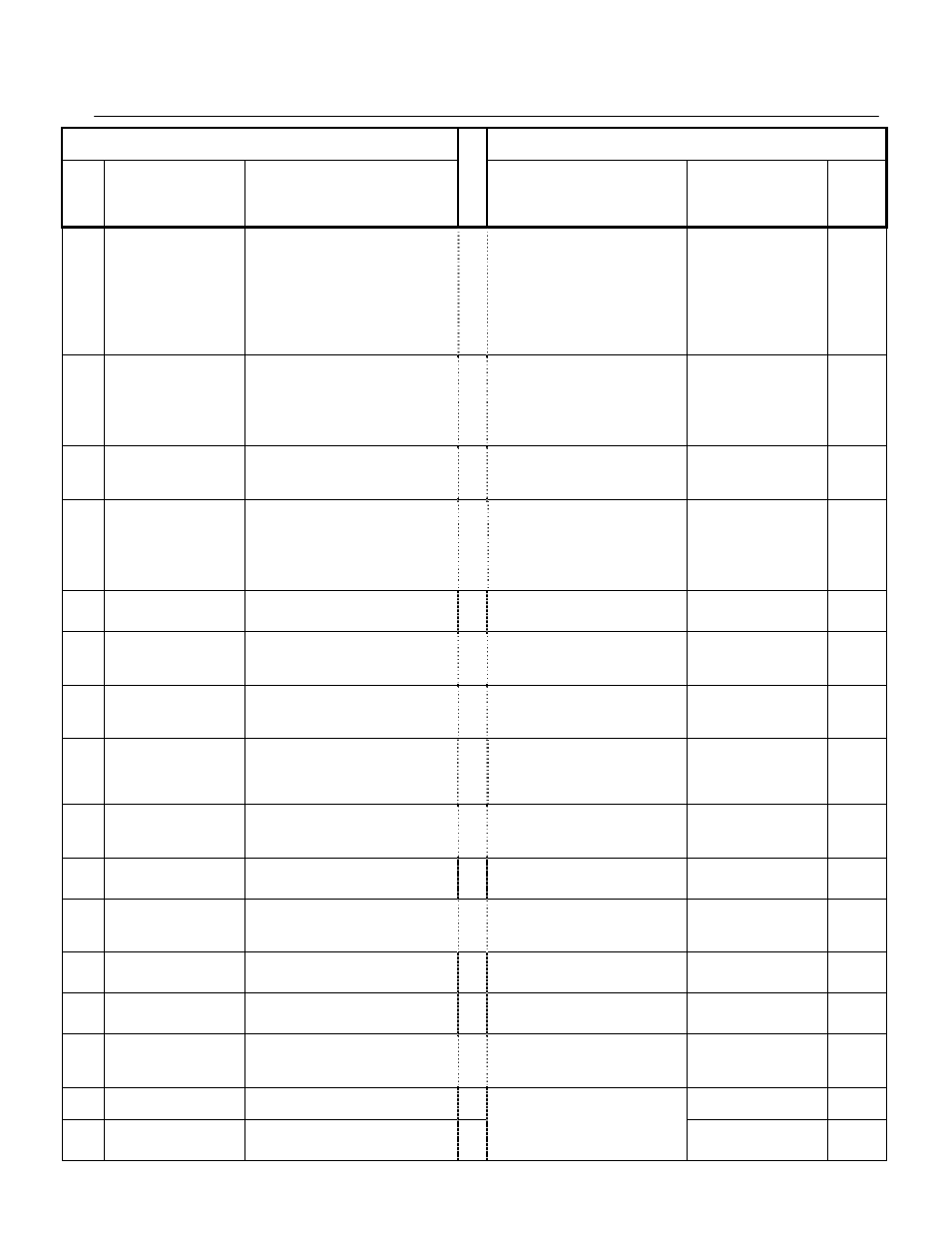
Appendix 3- Parameter Cross Reference
Page
44
of 48
GPD506/P5 Parameter
P7 Parameter
Param
No.
Nxxx
Parameter
Name
Description or Selection
Description or Selection
Parameter
Name
Param.
No.
081
(timer function)
Off delay time
Set unit: 0.1sec
Set range: 0.0-25.5sec
0.0 to 3000.0
Used in conjunction with a multi-function
digital input and a multi-function digital
output programmed for the timer function.
This sets the amount of time the output
stays energized after the digital input is
opened.
Timer Function OFF-Delay
Time
b4-02
082
Braking resistor
Overheat protection
0: Braking resistor overheat protection
disabled.
1: Braking resistor overheat protection
enabled.
Selects the DB protection only when using
3% duty cycle heatsink mount Yaskawa
braking resistor. This parameter does not
enable or disable the DB function of the
Drive.
0: Not Provided
1: Provided
Internal Dynamic Braking
Resistor
Protection Selection
L8-01
083
Input open-phase
detection level
Set unit:1% and set range: 1-100%
(Open-phase detection disabled at set point
=100%)
Monitors the DC Bus current ripple and
activates when
one of the input phases is lost (PF).
Input Phase Loss Detection
Level
L8-06
084
(PID control)
PID control selection
0: PID control disabled.
1: PID control enabled. (D=Fdbk)
2: PID control enabled. (D=Fdfwd)
3: PID control enabled.
(D=Fdbk, feedback=reverse)
This parameter enables / disables the closed
loop (PI) controller.
0: Disabled
1: Enabled (commanded speed becomes PI
setpoint)
3: Fref+PI
PI Mode Setting
b5-01
086
(PID control)
Proportional gain
Set unit: 0.1
Set range: 0.0-10.0
0.00 to25.00
Sets the proportional gain of the PID
controller.
Proportional Gain Setting
b5-02
087
(PID control)
Integral time
Set unit: 0.1sec
Set range: 0.0-100.0sec
0.0 to 360.0
Sets the integral time for the PID
controller. A setting of zero disables
integral control.
Integral Time Setting
b5-03
089
(PID control)
Integration upper limit
Set unit: 1%
Set range: 0-109%
0.0 to100.0
Sets the maximum output possible from the
integrator. Set as a% of maximum
frequency.
Integral Limit Setting
b5-04
090
PID Feedback loss
detection selection
0: PID feedback loss disabled.
1: PID feedback loss enabled, no fault
detected.
2: PID feedback loss enabled, fault detection
enabled.
0: Disabled
1: Alarm
2: Fault
PI Feedback Reference
Missing Detection Selection
b5-12
091
PID Feedback loss
detection level
Set unit:1%
Set range: 0-100%
0 to 100
Sets the PID feedback loss detection level
as a percentage of maximum frequency
(E1-04).
PI Feedback Loss Detection
Level
b5-13
092
PID Feedback loss
detection time
Set unit: 0.1sec
Set range: 0.0-25.5sec
0.0 to 25.5
Sets the PID feedback loss detection delay
time in terms of seconds.
PI Feedback Loss Detection
Time
b5-14
093
PID output
reverse-characteristic
0: Reverse-characteristic disabled
1: Reverse-characteristic enabled.
Determines whether the PID controller will
be direct or reverse acting.
0: Normal Output (direct acting)
1: Reverse Output (reverse acting)
PI Output Level Selection
b5-09
094
PID Sleep function
operation level
Set unit: 0.1Hz
Set range: 0.0-400.0Hz
0.0 to 200.0
Sets the sleep function start frequency.
Sleep Function Start
Level
b5-15
095
PID Sleep function
operation time
Set unit: 0.1sec
Set range: 0.0-25.5sec
0.0 to 25.5
Sets the sleep function delay time in terms
of seconds.
Sleep Delay Time
b5-16
096
Energy Saving
Selection
0: Energy saving disabled
1: Energy saving enabled
Energy Savings function enable/disable
selection.
0: Disabled
1: Enabled
Energy Saving Control
Selection
b8-01
098
Energy Save Voltage Lower
limit @ 60 Hz
Set unit: 1%
Set range: 0-120%
Power Detection Filter Time
b8-05
099
Energy Save Voltage Lower
limit @ 6 Hz
Set unit:1%
Set range:0-25%
Used to fine-tune the energy savings
function when in V/F control method.
Search Operation Voltage
Limit
b8-06