Important positions for approach and departure, Approaching and departing a contour 6.3 – HEIDENHAIN TNC 640 (34059x-05) ISO programming User Manual
Page 213
Approaching and departing a contour
6.3
6
TNC 640 | User's ManualDIN/ISO Programming | 1/2015
213
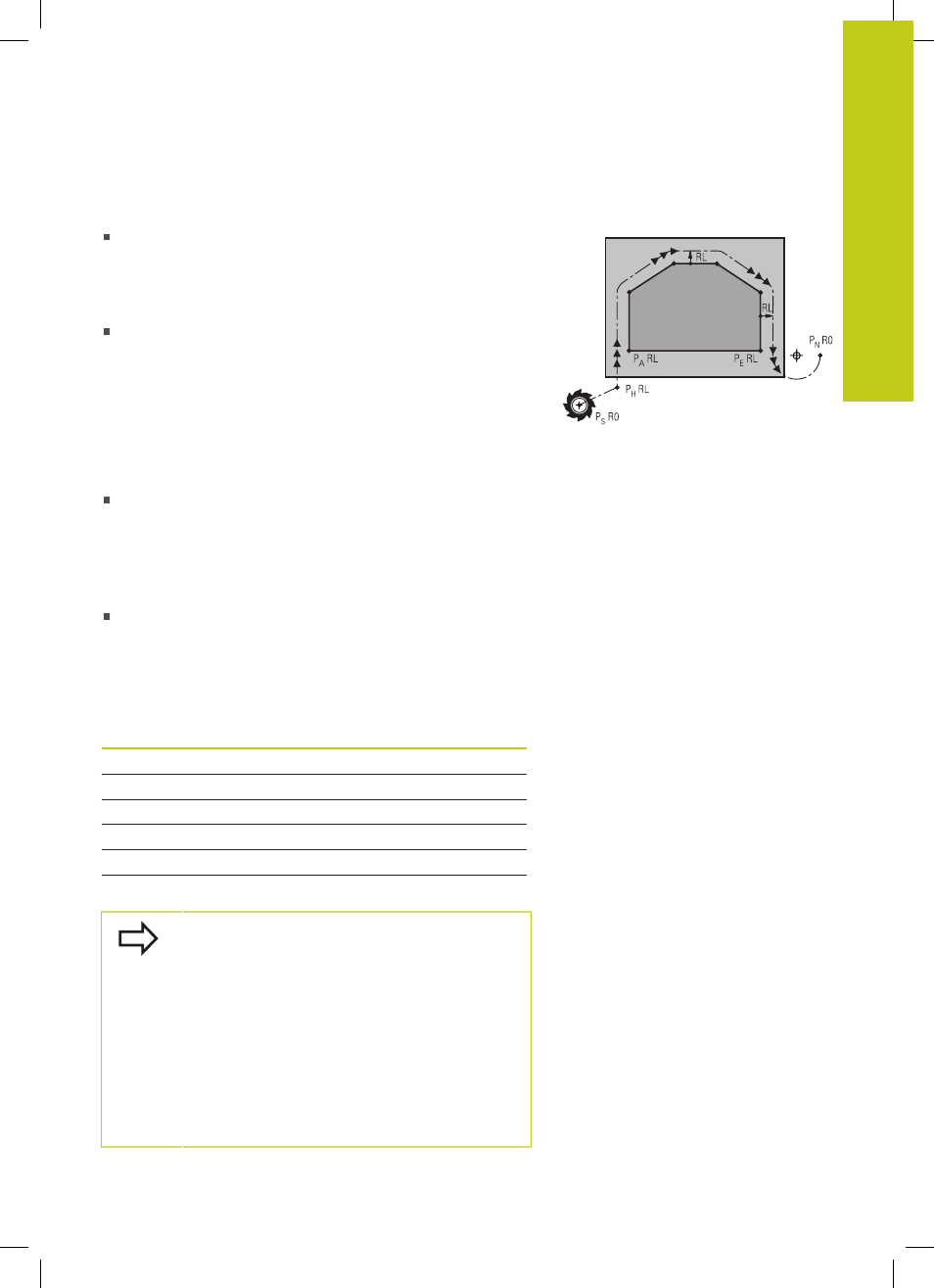
Important positions for approach and departure
Starting point P
s
You program this position in the block before the APPR block.
P
S
lies outside the contour and is approached without radius
compensation (G40).
Auxiliary point P
H
Some of the paths for approach and departure go through an
auxiliary point P
H
that the TNC calculates from your input in the
APPR or DEP block. The TNC moves from the current position
to the auxiliary point P
H
at the feed rate last programmed. If you
have programmed
G00 (positioning at rapid traverse) in the last
positioning block before the approach function, the TNC also
approaches the auxiliary point P
H
at rapid traverse.
First contour point P
A
and last contour point P
E
You program the first contour point P
A
in the APPR block. The
last contour point P
E
can be programmed with any path function.
If the APPR block also contains a Z axis coordinate, the TNC will
first move the tool to P
H
in the working plane, and then move it
to the entered depth in the tool axis.
End point P
N
The position P
N
lies outside of the contour and results from your
input in the DEP block. If the DEP block also contains a Z axis
coordinate, the TNC will first move the tool to P
N
in the working
plane, and then move it to the entered height in the tool axis.
Abbreviation
Meaning
APPR
Approach
DEP
Departure
L
Line
C
Circle
T
Tangential (smooth connection)
N
Normal (perpendicular)
The TNC does not check whether the programmed
contour will be damaged when moving from the
actual position to the auxiliary point P
H
. Use the test
graphics to check.
With the APPR LT, APPR LN and APPR CT functions,
the TNC moves the tool from the actual position to
the auxiliary point P
H
at the feed rate/rapid traverse
that was last programmed. With the APPR LCT
function, the TNC moves to the auxiliary point P
H
at
the feed rate programmed with the APPR block. If no
feed rate is programmed before the approach block,
the TNC generates an error message.
R0=G40; RL=G41; RR=G42