2 al20xx – BECKHOFF AL2000 Linear servomotor User Manual
Page 51
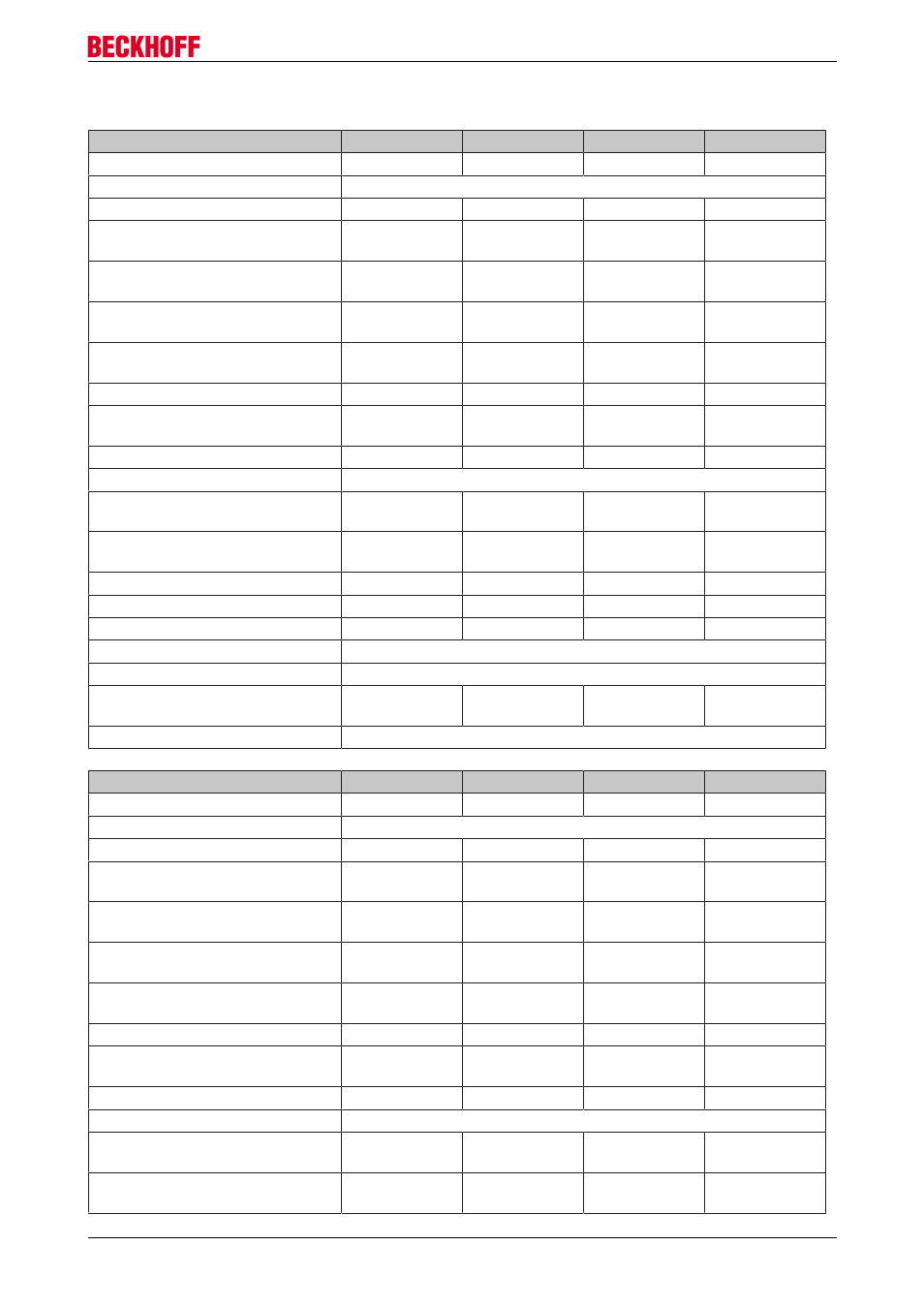
Technical data
11.2
AL20xx
Technical data
AL2003
AL2006
AL2009
AL2012
Winding type
S
N / S
N / S
N / S
Motor configuration
3phase synchronous linear motors (400 – 480 V AC)
Peak force 3 s (FP)
225 N
450 N
675 N
900 N
Peak current (IPa)
5 A
6.5 A (N),
13 A (S)
8 A (N),
15 A (S)
13 A (N),
26 A (S)
Continuous force with water cooling
(Fcw)
105 N
210 N
315 N
420 N
Continuous force with air cooling
(Fca)
75 N
150 N
225 N
300 N
Continuous current (Ica)
1.6 A
1.6 A (N),
3.3 A (S)
3.6 A (N),
6.8 A (S)
3.3 A (N),
6.5 A (S)
Continuous power loss (Pca)
80 W
155 W
226 N
310 W
Power constant (Kf)
46 N/A
93 N/A (N),
46 N/A (S)
87 N/A (N),
46 N/A (S)
93 N/A (N),
46 N / A (S)
Motor constant (Km)
185 N²/W
370 N²/W
570 N²/W
740 N²/W
Pole spacing
24 mm
Winding resistance phase (Rf)
3.9 Ω
7.8 Ω (N),
2 Ω (S)
4.4 Ω (N),
1.2 Ω (S)
3.9 Ω (N),
1 Ω (S)
Winding inductance phase (Lf)
30 mH
60 mH (N),
15 mH (S)
33 mH (N),
9 mH (S)
30 mH (N),
7,5 mH (S)
Thermal resistance (Rth)
0.96 °C/W
0.48 °C/W
0.32 °C/W
0.24 °C/W
Magnetic attractive force (Fa)
500 N
900 N
1325 N
1700 N
Weight of the coil unit (Mp)
0.9 kg
1.5 kg
2.0 kg
2.6 kg
Air gap
0.5 mm
Temperature sensor
PTC 1 kΩ
Suitable servo drive
AX5x03
AX5x03 (N),
AX5x06 (S)
AX5x06 (N),
AX5112 (S)
AX5x06 (N),
AX5112 (S)
Minimum static bending radius
4 x cable diameter
Technical data
AL2015
AL2018
AL2024
Winding type
N / S
N / S
N / S
Motor configuration
3phase synchronous linear motors (400 – 480 V AC)
Peak force 3 s (FP)
1125 N
1350 N
1800 N
Peak current (IPa)
13 A (N),
33 A (S)
20 A (N),
41 A (S)
26 A (N),
52 A (S)
Continuous force with water cooling
(Fcw)
525 N
630 N
840 N
Continuous force with air cooling
(Fca)
375 N
450 N
600 N
Continuous current (Ica)
3.3 A (N),
8.2 A (S)
4.8 A (N),
10 A (S)
6.5 A (N),
13 A (S)
Continuous power loss (Pca)
370 W
453 W
620 W
Power constant (Kf)
112 N/A (N),
46 N / A (S)
93 N/A (N),
44.9 N / A (S)
93 N/A (N),
46 N / A (S)
Motor constant (Km)
970 N²/ W
1140 N²/W
1480 N²/ W
Pole spacing
24 mm
Winding resistance phase (Rf)
4.3 Ω (N),
0.75 Ω (S)
2.5 Ω (N),
0.59 Ω (S)
1.9 Ω (N),
0.48 Ω (S)
Winding inductance phase (Lf)
35 mH (N),
6.5 mH (S)
19 mH (N),
4 mH (S)
15 mH (N),
3.7 mH (S)
Linear servomotor AL2xxx
51
Version 4.0