Telegram 81 of profile profidrive – Baumer GE-GB-GXxxx User Manual
Page 18
Manual_ProfibusDPV2_BIDE_EN.docx
18/41
Baumer IVO GmbH & Co. KG
22.11.12
Villingen-Schwenningen, Germany
6.3. Telegram 81 of profile PROFIdrive
In line with PROFIBUS DP-V2 profile the encoder applies for cyclic communication in clock-synchronous
operation telegram81 of the PROFIdrive profile which means cyclic and clock-synchronous transmission of
12 bytes input data and 4 bytes output data.
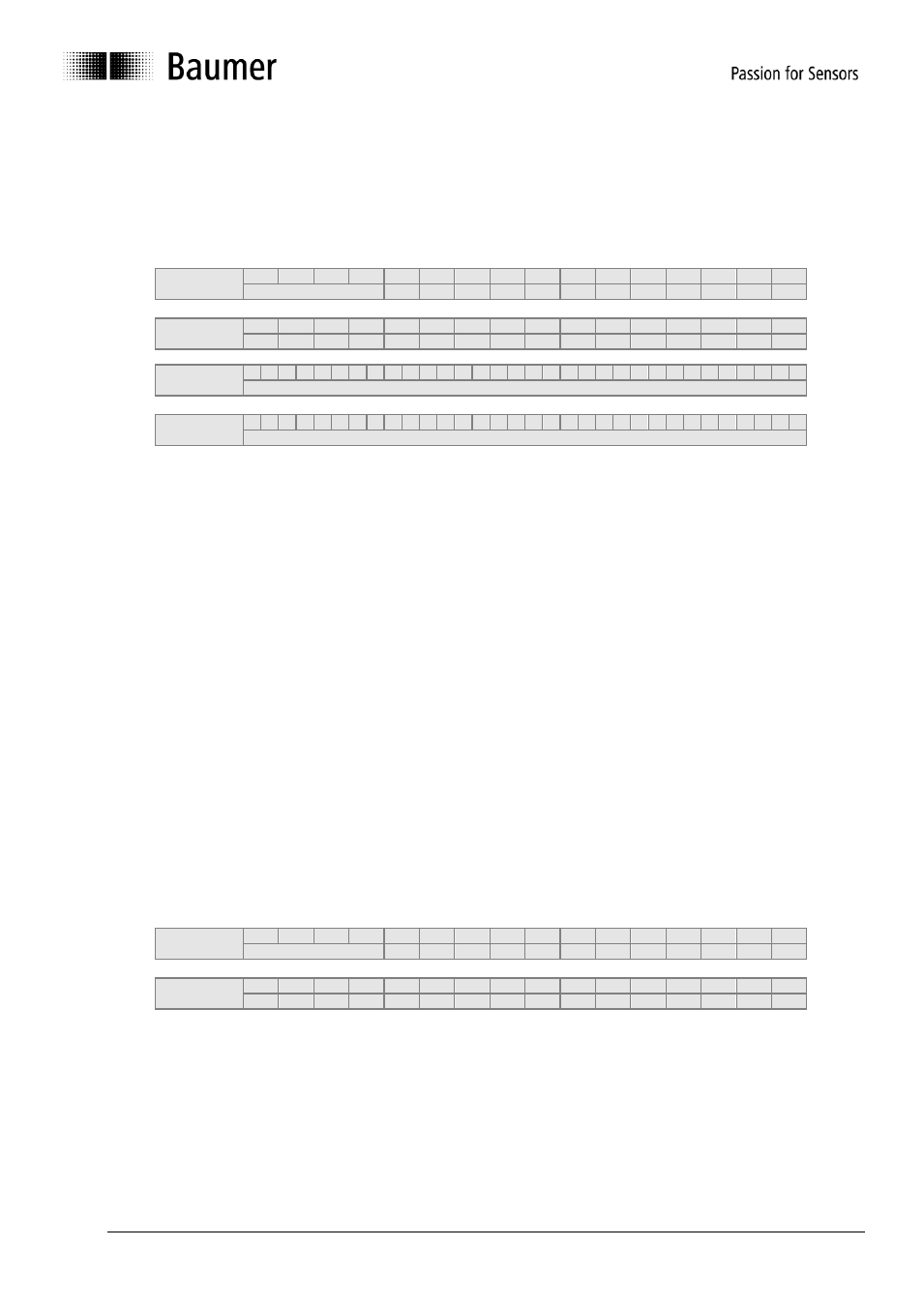
Input data
There is a cyclic transmission of input data from encoder to control.
ZSW2
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Slave Sign-of-Life
0
0
0
0
0
0
0
0
0
0
0
0
G1_ZSW1
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
SE
PS
TA
PA
EA
0
0
0
0
0
0
0
0
0
0
0
G1_XIST1
31
0
encoder position (left-aligned) with / less preset offset
G1_XIST2
31
0
Encoder position (right-aligned) or error message
Bit SE: Sensor Error
If this bit is set, G1_XIST2 will come with an error code instead of the position value
Bit PS: Parking Sensor Active (Acknowledgement)
If this bit is set, the function „Parking Sensor“ will be enabled (error output suppressed)
Bit TA:
Transmit absolute value cyclically (Acknowledgement)
If this bit is set, there will be cyclic position transmission in G1_XIST2.
This always applies to the present encoder.
Bit PA: Preset Acknowledgement
When this bit is set, the preset setting operation at the encoder was successful. The bit
mirrors the preset bit of the output data and is automatically taken back after reset.
Bit EA: Error Acknowledge Required
If this bit is set, an encoder error will have to be acknowledged. This is not general practice
with the present encoder (bit ever 0)
Position data are transmitted by both input double words G1_XIST1 and G1_XIST2. G1_XIST1
comprises the left-aligned position value, e.g. bit 31 = 1 as maximum position value (corresponding to
scaling). G1_XIST2 contains the right-aligned position value in the standard structure. G1_XIST2
further comprises an error code in case of error. The scaling operation always affects both double
words. The effect of the preset on position value G1_XIST1 can be eliminated by parameterization
(„G1_XIST1 affected by Preset“). In this case G1_XIST1 and G1_XIST2 show different position
values. G1_XIST2 is always affected by preset.
Output data
There is a cyclic transmission of output data to the encoder.
STW2
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Master Sign-of-Life
0
0
0
0
0
0
0
0
0
0
0
0
G1_STW1
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
SEA PS
TA
PR REL
0
0
0
0
0
0
0
0
0
0
0
Bit SEA: Sensor Error Acknowledgement
If this bit is set, the error code in G1_XIST2 will be acknowledged what is not
not necessarily required with the present encoder.
Bit PS: Parking Sensor Active (acknowledgement)
It this bit is set, the function „Parking Sensor“ will be enabled (error output suppressed
Bit TA:
Transmit absolute value cyclically (Acknowledgement)
If this bit is set, there will be a cyclic position transmission in G1_XIST2.
This ever applies to the present encoder, no matter if the bit is set or not.