Read / write timeout at bus error rs485 „j“ (6ah), Read / write motor system times „k“ (6bh), Setting the jog step scale „l“ (6ch) – Baumer N 152 User Manual
Page 22
N 152
www.baumer.com
22
4.3.8. Read / write timeout at bus error RS485 „j“ (6Ah)
This command is utilized to read or write the system time: timeout at bus error. Value range is within 00,1 s to
99,9 s. Tolerance: ±7% at minimum time; < 1‰ at maximum time, approx. 1% at 1.
Function: RS485 bus monitoring during motive shaft positioning operations. If there is no interface activity within
the programmed timeout the motor will stop (EMERGENCY OFF) upon occurring a bus error or in case of an
inactive control. A motor restart requires transmitting the profile (command „S“ or „V“) together with start signal
(command „D“). Setting 0.00 s means function disabled.
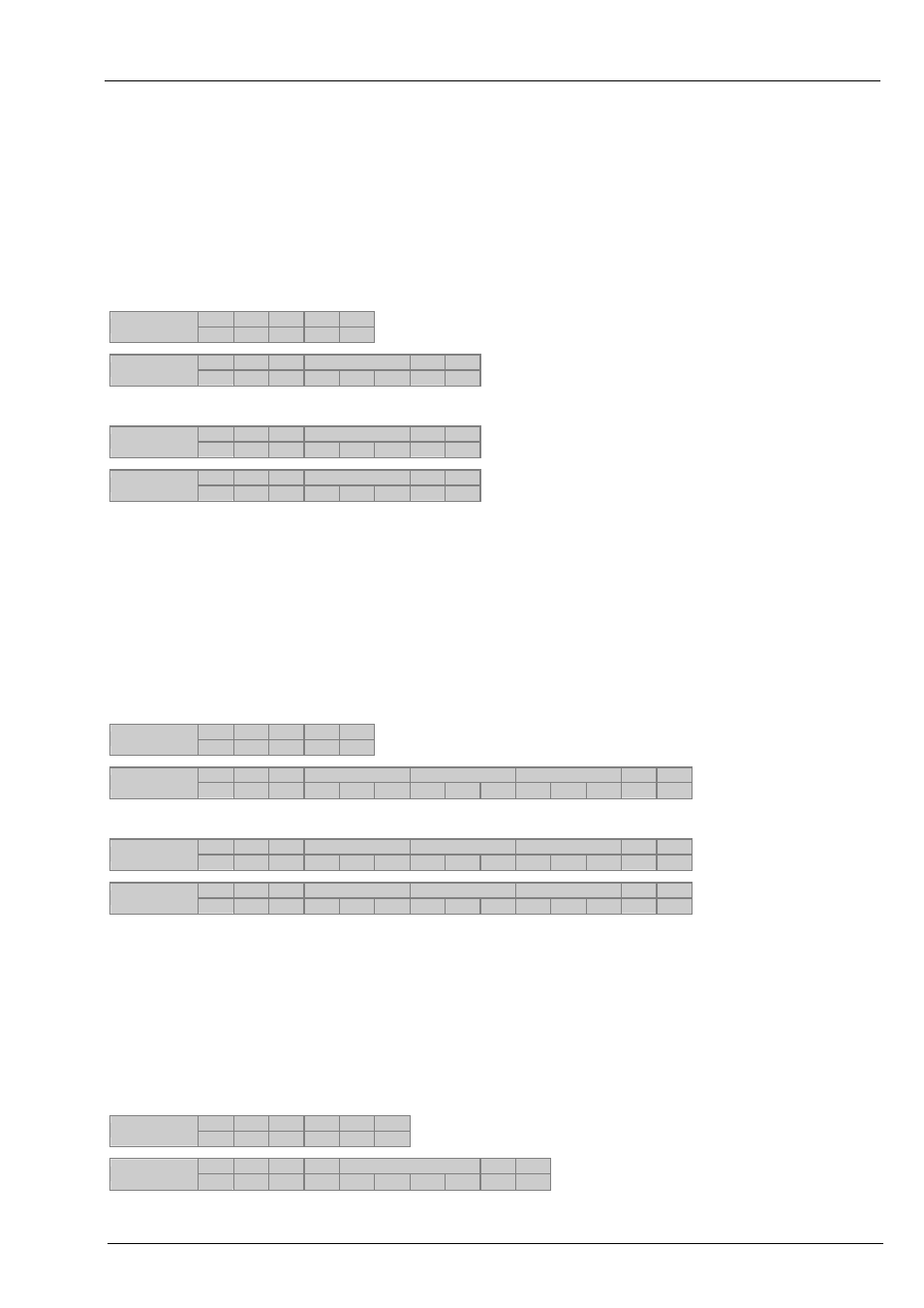
Example 1: Read parameter (time= 2.5 s)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 6Ah 04h 58h
SOH Adr Cmd
Time =2.5 s
EOT CRC
Response
01h 20h 6Ah 30h 32h 35h 04h C5h
Example 2: Write parameter (time = 13.5 s)
SOH Adr Cmd
Loop =13.5 s
EOT CRC
Transmission
01h 20h 6Ah 31h 33h 35h 04h C9h
SOH Adr Cmd
Loop =13.5 s
EOT CRC
Response
01h 20h 6Ah 31h 33h 35h 04h C9h
4.3.9. Read / write motor system times „k“ (6Bh)
This command is utilized to read or write the individual motor system times within the range of 00,1 s to 99,9 s.
Tolerance: ±7% at minimum time; < 1‰ at maximum time, approx. 1% at 1 s.
The following 3 parameters are available:
Loop:
Waiting time at turning point during loop operation.
Trailing error: Timeout of motor signals, if shaft does not rotate after motor start.
Clamping:
timeout reply between loose/active clamping or break
prior to motor start / after motor stop.
Example 1: Read parameter (loop = 1.0 s; trailing error = 3.5 s; clamping = 0.5 s)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 6Bh 04h 5Ah
SOH Adr Cmd
Loo p=1.0 s
Traling error=3.5s
Clamping =0.5 EOT CRC
Response
01h 20h 6Bh 30h 31h 30h 30h 33h 35h 30h 30h 35h 04h E3h
Example 2: Write parameter (loop = 2.0 s; trailing error = 6.5 s; clamping = 1.5 s)
SOH Adr Cmd
Loop =2.0 s
Trailing error=6.5s
Clamping =1.5 EOT CRC
Transmission
01h 20h 6Bh 30h 32h 30h 30h 36h 35h 30h 31h 35h 04h 44h
SOH Adr Cmd
Loop =2.0 s
Trailing error=6.5s
Clamping =1.5 EOT CRC
Response
01h 20h 6Bh 30h 32h 30h 30h 36h 35h 30h 31h 35h 04h 44h
4.3.10. Setting the jog step scale „l“ (6Ch)
This command is utilized to read or write the jog step scale within the range from 0- 999.
Parameter 0 will disable the Jog function, both by keypad and by external inputs.
Note: The jog function must be enabled in command „m“, lock in one direction is possible as an option.
The respective jog step is always completely accomplished during a motor positioning operation and cannot be
stopped or restarted by actuating another key. However it is possible to stop by interface (command „D“). With
running motor the moving bit is set to 1 (refer also command “F”).
Example 1: Read jog step
SOH Adr Cmd
SCmd
EOT CRC
Transmission
01h 20h 6C 53h 04h 5Ah
SOH Adr Cmd
SCmd
Jog step = 25
EOT CRC
Response
01h 20h 6Ch 53h 30h 30
32
35
04h
44h