Read / write bit parameters „a“ (61h), Significance of parameter „a – Baumer N 152 User Manual
Page 16
N 152
www.baumer.com
16
4.3.1. Read / write bit parameters „a“ (61h)
To exploit maximum memory capacity, several parameters are put together and transferred as “data pack”
under the following parameter codes:
Data1: 1 0 X X 0 X 0 X
┬ ──┬── ─┬─ ─┬─
│ │ │ └─── positioning direction 0/1 (UP/DOWN)
│ │ └─────── counting direction 0/1 (UP/DOWN)
│ └──────────── arrows 0/1/2/3 (UP/DOWN/UNI/OFF)
└──────────────── 1
Data2: 1 0 X X X X 0 X
┬ ┬ ─┬─ ┬ ┬ ─┬─
│ │ │ │ │ └─── round actual value 0/1 (OFF/ON)
│ │ │ │ └────── turn display 0/1 (OFF/ON)
│ │ │ └──────── dimension 0/1 (OFF/ON)
│ │ └─────────── actual value correction 0/1/2 (OFF/ON/On+Key)
│ └────────────── reserved
└──────────────── 1
Data3: 1 0 0 0 0 X X X
┬ ───┬─── ┬ ─┬─
│ │ │ └─── hide target 0/1/2 (ON/OFF/EVER)
│ │ └────── resolution 0/1 (1/100;1/10)
│ └─────────── reserved
└──────────────── 1
Data4/5: 0 0 1 1 0 0 0 0
───┬───
└───── reserved
Important: Only bits marked ‘X’ may be altered. The permanent parameters „1“ and „0“ must not be altered
since this might create a control token ( tokens < 20h) what is not permitted in ASCII protocol.
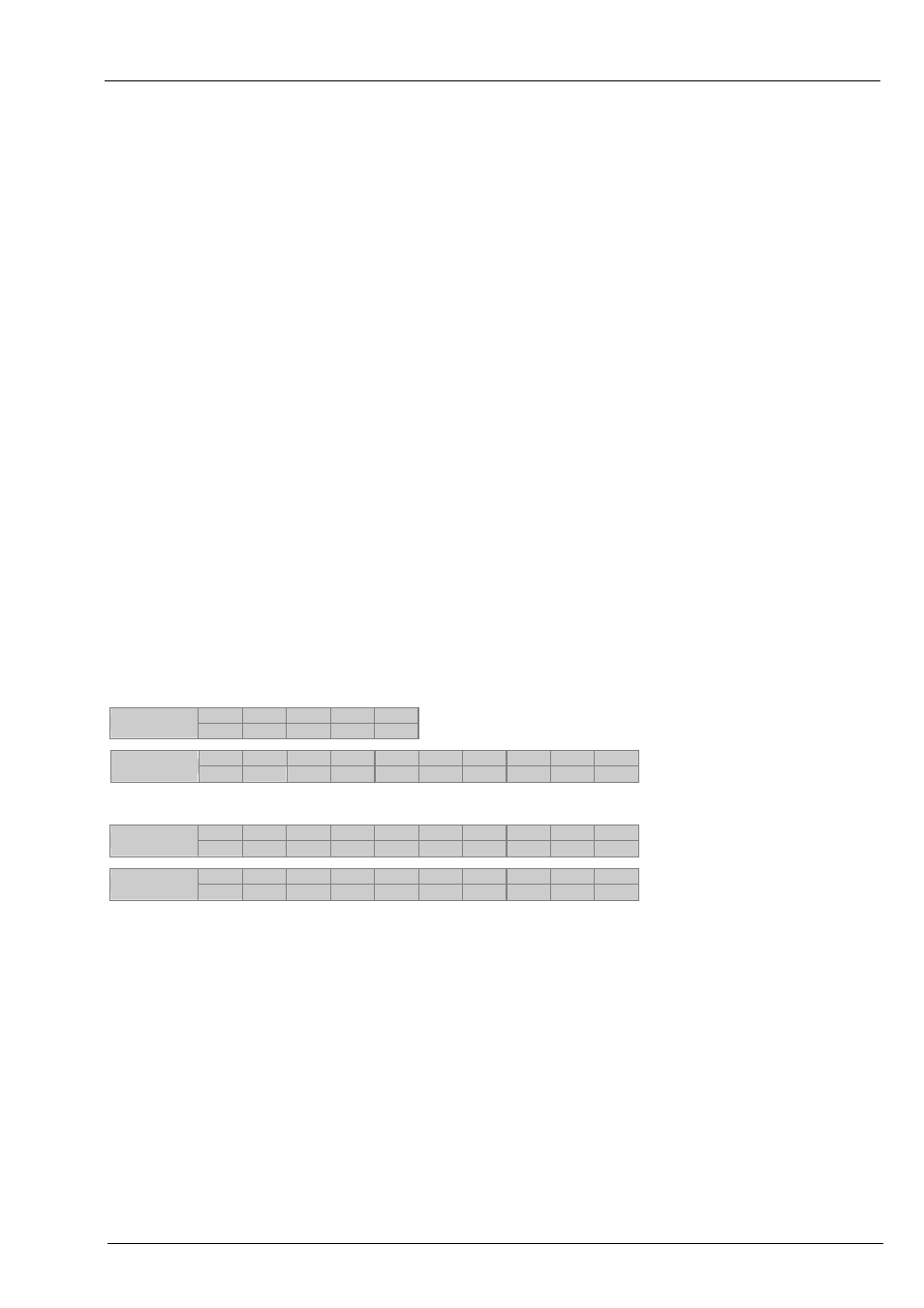
Example 1: read bit parameter (data1 to data3 = 80h; data4 to data5 = 30h)
SOH
Adr
Cmd
EOT
CRC
Transmission
01h
20h
61h
04h
4E
b
it parameter default
Example 2: write bit parameter (positioning direction = down; turn display = On)
SOH
Adr
Cmd Data1 Data2 Data3 Data4 Data5
EOT
CRC
Transmission
01h
20h
61h
81h
84h
80h
30h
30h
04h
91h
SOH
Adr
Cmd Data1 Data2 Data3 Data4 Data5
EOT
CRC
Response
01h
20h
61h
81h
84h
80h
30h
30h
04h
91h
Significance of parameter „a“
Positioning direction
This parameter defines the direction the target is aimed for. Tolerances that occur for example at cogwheels,
joints, shafts etc during a precise positioning operation requires a tolerance compensation. The tolerance
compensation is proceeded by aiming for the target position always from the same direction utilizing so-called
loops. Loops mean that the target position is first crossed by a defined distance and then aimed for again from the
opposite direction. The parameter for the crossing distance is programmed by command “b”. Whether a loop is
required or not is indicated by the arrows in the display. A flashing arrow means tolerance compensation required.
Upon reaching the turning point the direction changes and the arrow stops flashing. Targets allowing direct
positioning are marked by a non-flashing arrow. Upon achieving the target within the programmed tolerances (see
command “b”) the arrows will not disappear until the required tolerance compensation has been completed.
00 = Up
Direct positioning if target position > actual position; otherwise proceed tolerance compensation
01 = Down
Direct positioning if target position < actual position; otherwise proceed tolerance compensation
SOH
Adr
Cmd Data1 Data2 Data3 Data4 Data5
EOT
CRC
Response
01h
20h
61h
80h
80h
80h
30h
30h
04h
F1