Baumer N 152 User Manual
Page 18
N 152
www.baumer.com
18
Resolution
This parameter defines the resolution of the actual value. Upon altering the resolution the decimal point is shifted
correspondingly by one digit to the right or left, same applies also to actual value and target. The target values
however are not converted correspondingly but only the decimal point is shifted. When editing the machine please
pay attention to defining the resolution first so that the target values are transmitted to the SPAs with the
corresponding resolution.
0
Resolution 1/100 mm resp. 1/1000 inch visualized in the display: 000.00 mm resp. 00.000 inch
1
Resolution 1/10 mm resp. 1/100 inch visualized in the display: 0000.0 mm resp. 000.00 inch
4.3.2. Read / write bit parameter motor „m“ (6Dh)
To exploit maximum memory capacity, several parameters are put together and transferred as “data pack”
under the following parameter codes:
Data1: 1 0 X X 0 X 0 X
┬ ──┬── ─┬─ ─┬─
│ │ │ └─── key key assignment
0/1
(UP/DOWN)
│ │ └─────── direction motor direction of rotation 0/1
(UP/DOWN)
│ └──────────── Jog
Activate MicroStep
0/1/2/3 (UP/DOWN/EVER/ONLY)
└──────────────── 1
Data2: 1 0 X X 0 X X X
┬ ──┬── ┬ ──┬──
│ │ │ └──── reserved
│ │ └──────── reserved
│ └──────────── shaft type
0/1 (R/A)
└──────────────── 1
Data3: 1 0 X X 0 X X X
┬ ┬ ┬ ┬ ┬ ──┬──
│ │ │ │ │ └──── group 0
–
7
(groupe1/groupe2/…/groupe8)
│ │ │ │ └──────── reserved
│ │ │ └────────── assigned shafts
0/1 (OFF/ON)
│ │ └──────────── holding torque
0/1 (OFF/ON)
│ └────────────── reserved
└──────────────── 1
Data4/5: 0 0 1 1 X X X X 0 0 1 1 X X X X
───────┬─────── ───────┬─────── Leading shaft identifier for assigned shafts
│ └──────── ADR LSB (values 30h to 39h)
└─────────────────────────── ADR MSB (values 30h to 39h)
Important: Only bits marked ‘X’ may be altered. The permanent values „1“ and „0“ must not be altered since
thereby a control token ( tokens < 20h) might be created what is not permitted in ASCII.
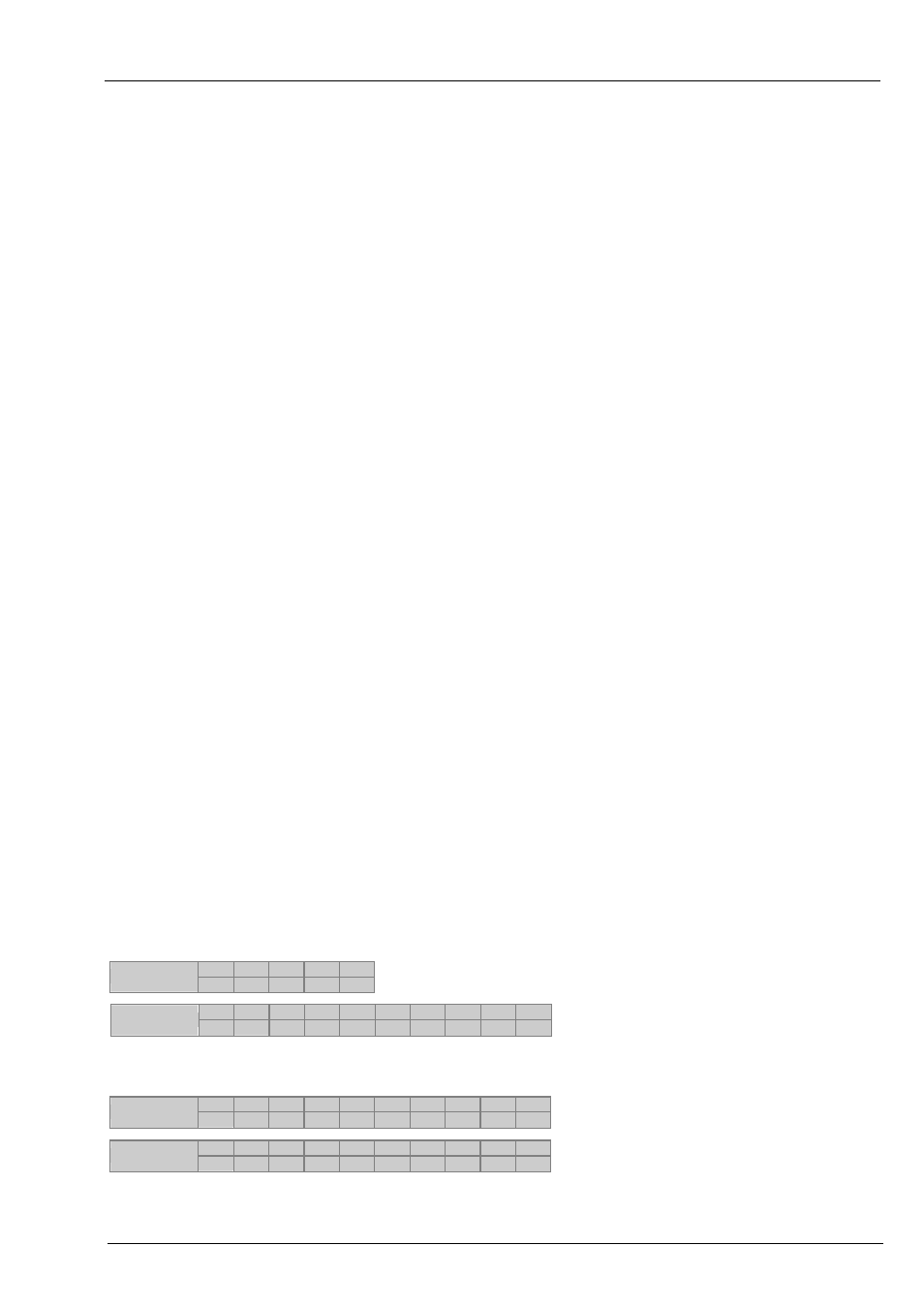
Example 1: Read bit parameter (data 1 to data 3 = 80h; data 4 to data 5 = 30h)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 6Dh 04h 56h
b
it parameter default
Example 2: Write bit parameter (key assignment = down; motor direction of rotation = Down)
SOH Adr Cmd Data1 Data2 Data3 Data4 Data5 EOT CRC
Transmission
01h 20h 6Dh 81h 84h 80h 30h 30h 04h
92h
SOH Adr Cmd Data1 Data2 Data3 Data4 Data5 EOT CRC
Response
01h 20h 6Dh 81h 84h 80h 30h 30h 04h
92h
SOH Adr Cmd Data1 Data2 Data3 Data4 Data5 EOT CRC
Response
01h 20h 6Dh 80h 80h 80h 30h 30h
04h
F2h