2introduction, 3principle of operation – Baumer BA Scatec2 User Manual
Page 3
Manual SCATEC-2
5
Baumer Electric AG
Version 2011-05
www.baumer.com
Frauenfeld, Switzerland
2
Introduction
SCATEC-2 has the same key feature as all the other sensors from the SCATEC family: The capability
of non-contact detection of object edges. SCATEC is the sensor of choice when it comes to detect flat
objects conveyed in an overlapping stream or individually. The sensors in the SCATEC family were
developed and highly optimized particularly with regard to the specific demands of non-contact counting
of overlapping paper sheets and newspapers. Therefore the printing industry will be the ideal area of
application for the SCATEC.
Generally speaking a SCATEC sensor reacts to an edge facing the sensor’s laser beam. If the laser
beam strikes such an edge, SCATEC responds with an electrical output pulse of fixed duration.
However, built-in software allows the sensor among other things to suppress the reaction to certain
edges which were identified by the sensor as “false edges”. Therefore, SCATEC-2 makes it possible to
count newspapers to the highest degree of accuracy even at high conveyor speed.
Within the SCATEC family, the SCATEC-2 is characterized by the following properties:
(For details see specifications of the individual Scatec-2 types.)
•
counts edges from a thickness of 0.2 mm and greater
•
optimum working distance: 40 mm or 100 mm
•
intelligent false pulse suppression
•
parameter setting by means of DIP-switches
•
counting rate up to 600,000 copies per hour
•
with interface for remote control and data analysis
Manual SCATEC-2
6
Baumer Electric AG
Version 2011-05
www.baumer.com
Frauenfeld, Switzerland
3
Principle of operation
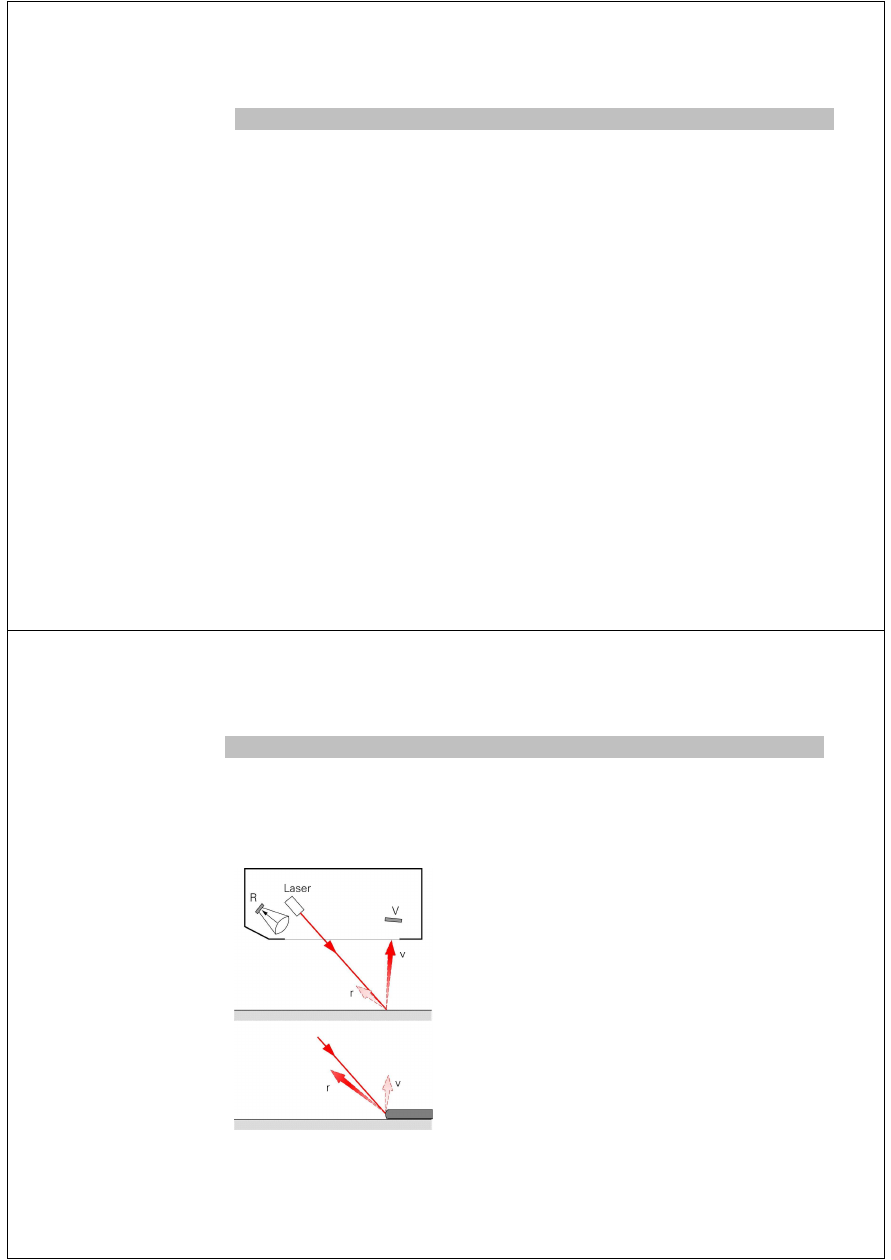
Described simply, the SCATEC-2 consists of a laser light source and two photodetectors. The beam is
aimed diagonally at the objects to be detected. Photodetector R is located close to the laser light source
and photodetector V a little further away. The sensor measures the ratio between signal v (light
scattered forward) and signal r (light scattered backward).
The ratio v/r differs widely depending whether the beam strikes on a flat surface or on an edge. When
an edge moves into the laser beam, the direct line of sight from detector V to the point of contact of the
laser is obstructed, which reduces signal v, and the edge
also increases the backward scattering, causing signal r to
increase. Both effects cause ratio v/r to become
substantially smaller than with a flat surface. If ratio v/r falls
below a specific level, the sensor interprets this as an edge.
This principle of operation clearly demonstrates that:
•
The orientation of the object to the beam is significant.
An edge facing towards the beam creates a small ratio
v/r, in contrast to an edge facing away from the beam.
•
Edge detection is independent of the color, as only the
ratio of the light intensities and not the absolute value
is used for detection.