About the positioning error, Specifications, English – Clarion NAX980HD User Manual
Page 54
55
NAX980HD
English
About the Positioning Error
Error of the vehicle position
When the vehicle travels, this system learns the
distance and the direction advanced on the map
from the traveling data and corrects the position
accordingly. (distance coefficient/learning
function). Therefore, some initial traveling data is
required for proper operation. According to the
traveling situation and condition of the GPS
satellites, the position of the vehicle position
mark and the actual vehicle position may be
different, but this is not a malfunction.
Effective method to avoid the
positioning error
When you use the system for the first time,
dislocation may appear as the traveling data is
few. Though, after traveling for a while on a road
where the signal from the GPS satellites can be
received well (such as national roads, principal
main roads, and principal minor roads), the
vehicle position mark will be displayed accurately
on the map. It is possible to train the system in a
short time when applying the following method:
Travel about 15 to 20 km on a smooth road where
there is no barrier in the sky like tall buildings or
forests (GPS signals can be received well) at a
constant speed of 25 km/h or more (try to avoid
frequent acceleration and moderation).
Specifications
GPS antenna
Mode: Microstrip flat antenna
Dimension: 30.4 (W) x 11.7 (H) x 35.5 (D) mm
Impedance: 50 Ohm
Navigation System
GPS receiving frequency: 1575.42 MHz, C/A
Code
Sensibility: -130 dBm or better
Number of GPS channels: 15 channels
Voice synthesis: ADPCM, Sampling frequency:
11.025 kHz
Power supply voltage: +14 V
Ground: Negative
Current consumption: less than 3.0 A
Dimensions (main unit): 205 (W)
u 29.5 (H) u 169
(D) mm
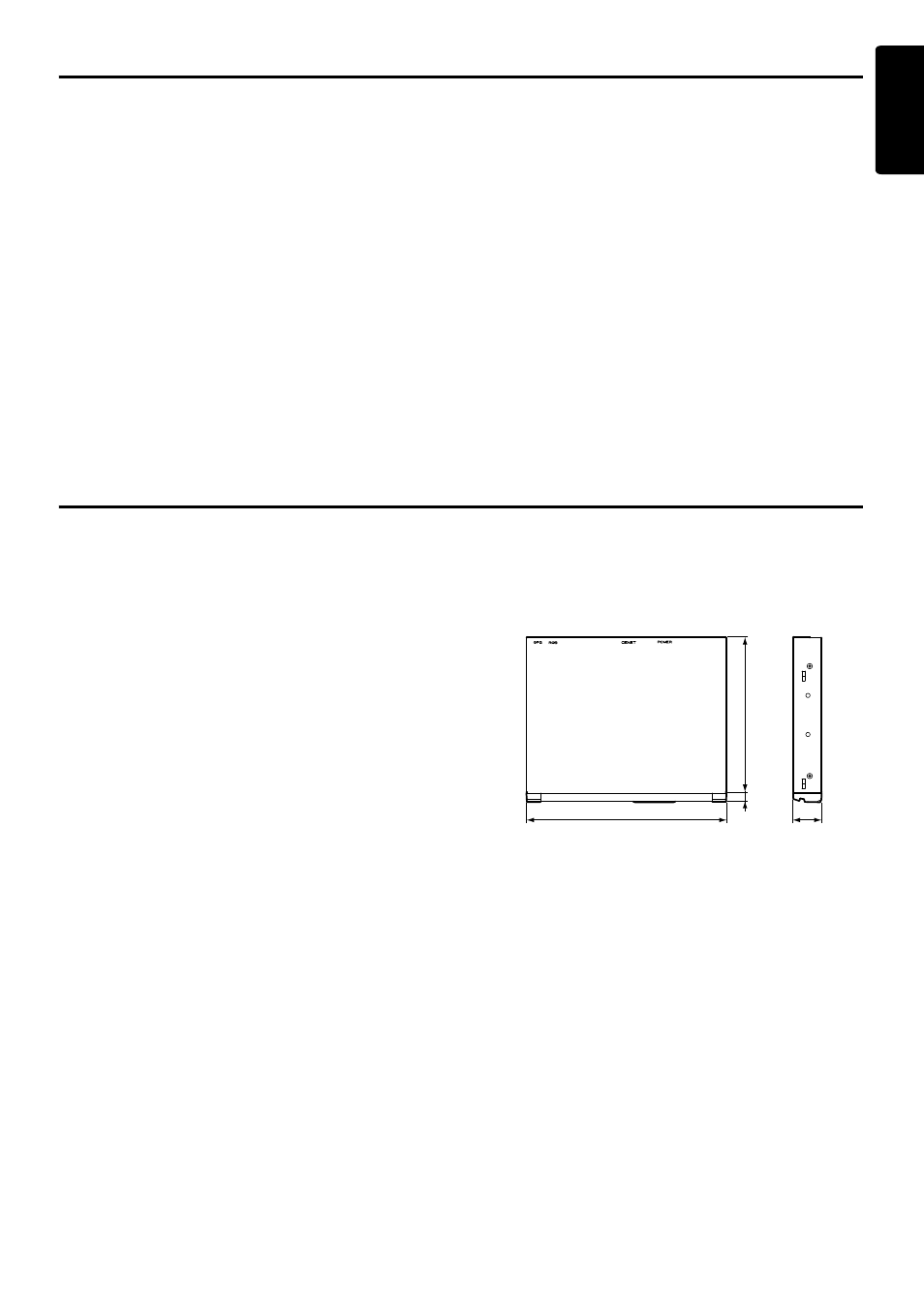
Configuration
●Dimensions (main unit)
Main unit: 205 (W)
u 29.5 (H) u 169 (D) mm
USB port opening: 17.5 (W)
u 9 (H) mm
Note:
Specifications and design are subject to change
without notice for future improvement.
9 mm
205 mm
160 mm
29.5 mm