DJI H3-3D User Manua User Manual
Page 11
©2014 DJI Innovations. All Rights Reserved.
11
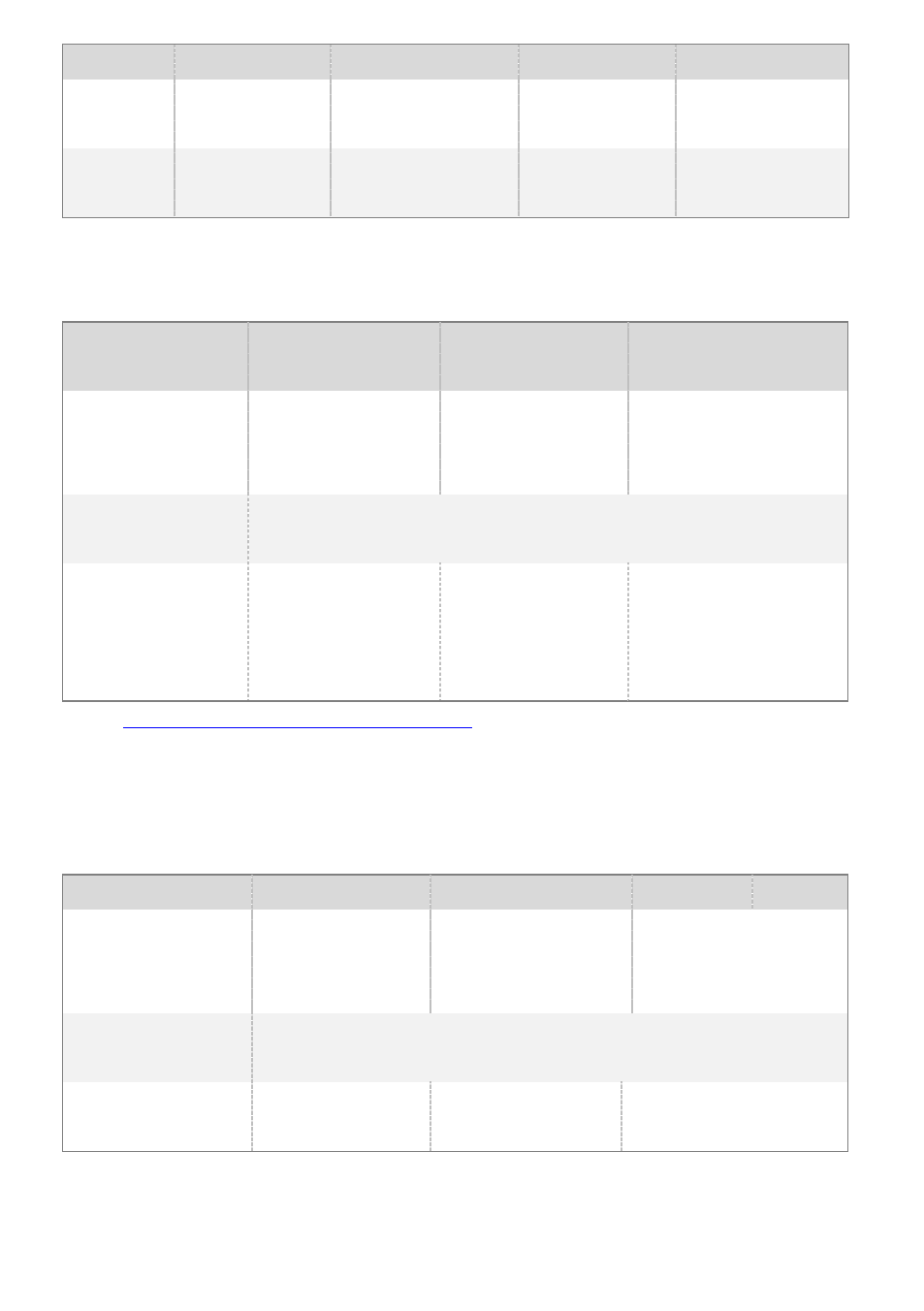
A2
WKM
NAZA-M V2
NAZA-M
Assistant
Software
V 1.20 (or
higher
)
V2.00
(or higher)
V2.12(or higher)
V2.12(or higher)
Firmware
Version
V 2.10 (or
higher
)
V5.22(or higher)
V3.12(or higher)
V3.12(or higher)
Step 2. Complete the connection on the flight control system (shown as the below table). For NAZA-M user, you
need a PMU V2 module (accessory of NAZA-M V2) to provide with the CAN port connection.
A2
WKM
NAZA-M V2 or
NAZA-M
(1) Main Controller and
PMU connection
Connect the X1 port of
PMU to X1 port of Main
Controller.
Connect the X1 port of
PMU to X1 port of Main
Controller.
Connect the X3 port of
PMU V2 to X3 port of Main
Controller.
(2)PMU Power Cable
connection
Connect the
power cable
to a connecter or solder the power cable to the central
board if the DJI-multirotor is being used.
(3)
GPS/Compass
Module and Flight
Control System
Connection
Connect to the CAN 2
port on the A2.
Connect the
GPS/Compass module
to spare CAN-Bus port
on PMU.
Connect the GPS/Compass
module to the GPS port of
PMU V2.
Refer to
2.2 GCU and DJI flight control System Connection
for more information about the connection. For details
on the flight control system connection, refer to the corresponding flight control system user manuals.
Step 3. Connect the GCU to flight control system. And then connect the 8-Pin cable of gimbal to the G8 port on
the GCU.
A2
WKM
NAZA-M V2
NAZA-M
(1)
GCU and flight
control System
connection
Connect to the CAN
2 port on A2.
Connect the GCU to the
spare CAN-Bus port on
the WKM system.
Connect the GCU to the
CAN-Bus port on the PMU
V2 module.
(2) GCU Power Cable
connection
Connect the
power cable
to a connecter or solder the power cable to the central
board if the DJI-multirotor is being used.
(3) Gimbal Tilt control
channel
H3-3D
X3
X1
Step 4. Connection finished. Power on the aircraft to launch.
Step 5. To fully utilize the gimbal, you also need to configure the tilt function of the gimbal. Flight control system