Advanced functions, A1 failsafe, Failsafe – DJI Naza-M User Manual
Page 16: An introduction of go-home and landing
©2013 DJI Innovations. All Rights Reserved.
16 |
Advanced Functions
A
1
FailSafe
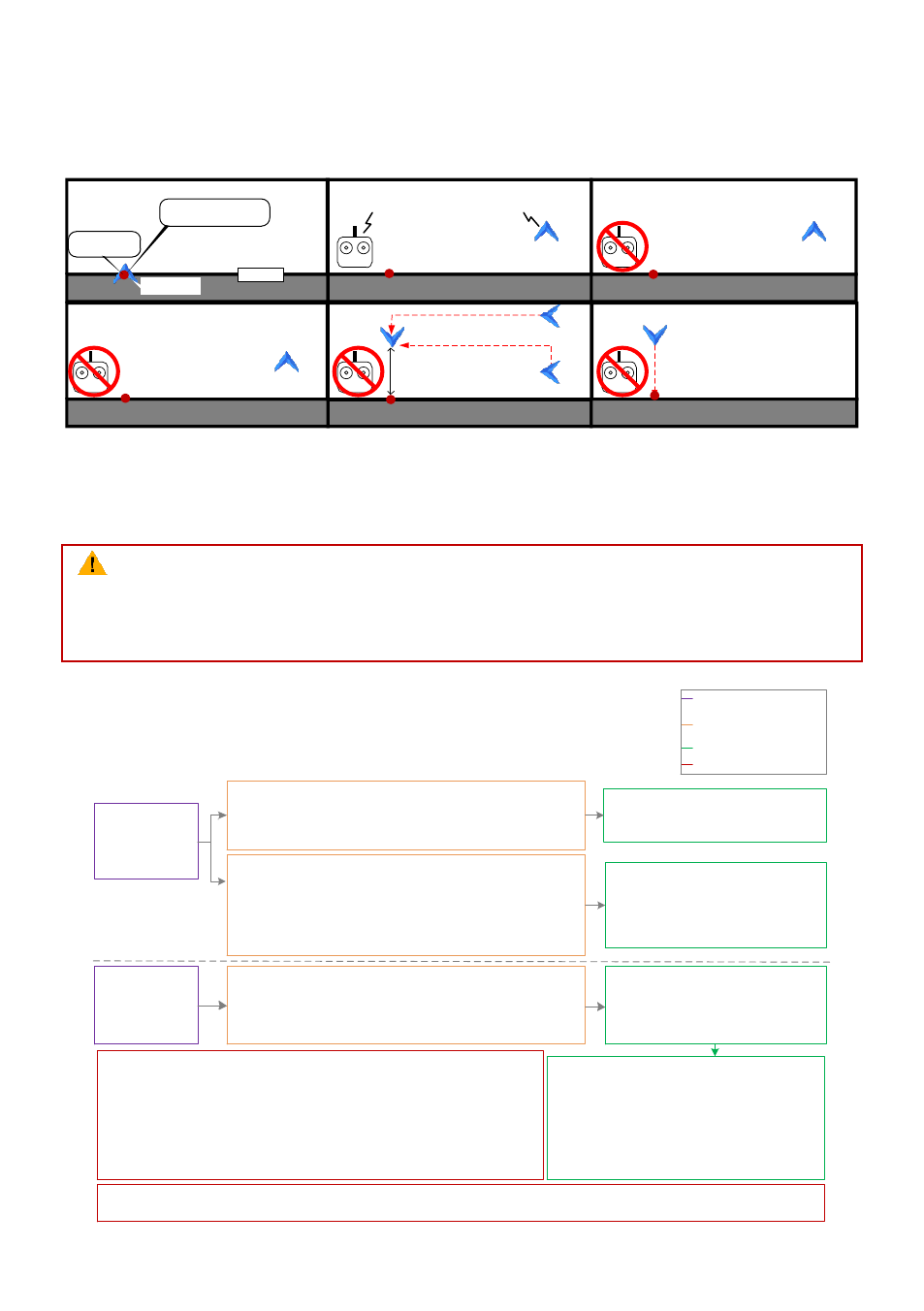
An introduction of Go-Home and Landing.
1
Record Home Point
Home Point
2
Tx
3
Tx
5
Tx
Signal lost
Tx
Multi-rotor
4
Tx
Signal lost >3s
Stay hover
Ready to Go-Home
Current location
≤ 20m
Current location > 20m
6
Ground
20m
Ascend
first
Hover 15s, then land
Go-Home
Go-Home
Home-point: Before takeoff, current position of multi-rotor will be saved as home-point by MC automatically when
you start the motors for the first time after 6 or more GPS satellites are found (red light blinks once or no blinking)
for 10 seconds.
Note
1. Please make sure to record the home-point before takeoff, and clearly know where it is.
2. During go-home the nose direction of the aircraft is facing toward the home-point, the aircraft is
flying directly from the current position to the home-point.
3. You can regain the control during the aircraft is hovering 15 seconds.
The flowchart of failsafe and how to regain control
(2)Turn off the
TX (we assume
you want to
trigger failsafe)
(1) The aircraft
flies far away,
TX is on but the
signal is weak.
Attitude Mode: In Attitude Mode as
soon as you get signal you can
regain control.
GPS Mode: switch the TX mode
switch to ATTI, if the receiver is
connected, then you will regain
control.
Attitude Mode: (1) the aircraft will level its attitude
immediately (2) 3 seconds later, failsafe is triggered and
aircraft will start to go home. (3) If signal is regained during
(1) or (2), it will resume normal flight immediately.
GPS Mode: (1) the aircraft will slow down and hover. (2) if
the signal is restored within 3 seconds (TX and receiver
connected), the system will immediately return to normal
operation; does not enter failsafe. (3) if not reconnected
within 3sec, the system will enter failsafe, then even if the
signal is restored, the system will not exit failsafe.
We strongly recommend you DO NOT try this, because there are three
types of risk:
(1) You must be pretty clear whether the Home-point is OK for landing or
not. (You have to understand the definition of Home-point well and the
working process of failsafe)
(2) If there are tall buildings around, the aircraft may be obstructed on the
way.
(3) When GPS signal is bad or GPS is not working, failsafe will not work.
In this case, the behavior of the aircraft is the same as in
the above condition.
If you want the aircraft to Return Home, please do not turn
the TX back on within 3 seconds
*
, otherwise the aircraft
will exit failsafe mode immediately.
When you turn off the TX, use the following
method to regain control:
(1) Switch the TX switch to GPS.
(2) and then put throttle to the center
position(greater than 3sec after switching off,
important), you can now turn the TX back on.
(3) then you can switch the TX Control mode
switch to ATTI to regain control.
If you choose to turn off the TX,
you must be pretty sure that you
know how to regain control. Here
we offer a method, please read
carefully.
This section will demonstrate the working logic of failsafe and how to regain control.
The following description is effective only when:
1. The aircraft is in flight.
2. The GPS works normally and signal is good (≥6 satellite, the LED blinks a single
red light or no red light).
Note: if you start the motors, but do not push the throttle to take-off the aircraft, in this case it is very dangerous to turn
off the TX, because the aircraft will take off automatically, so do not try this.
The aircraft behavior
after failsafe
How to regain control
Precautions
What triggered failsafe
*
If signal lost for more than 3 seconds failsafe will be triggered, if signal regained within 3 seconds it will exit failsafe immediately.