Sample application program, Trusted, Process control algorithms t8019 – Rockwell Automation T8019 Trusted Process Control Algorithm Software Package User Manual
Page 18
Trusted
TM
Process Control Algorithms T8019
Issue 8 Sep 07
PD-T8019
18
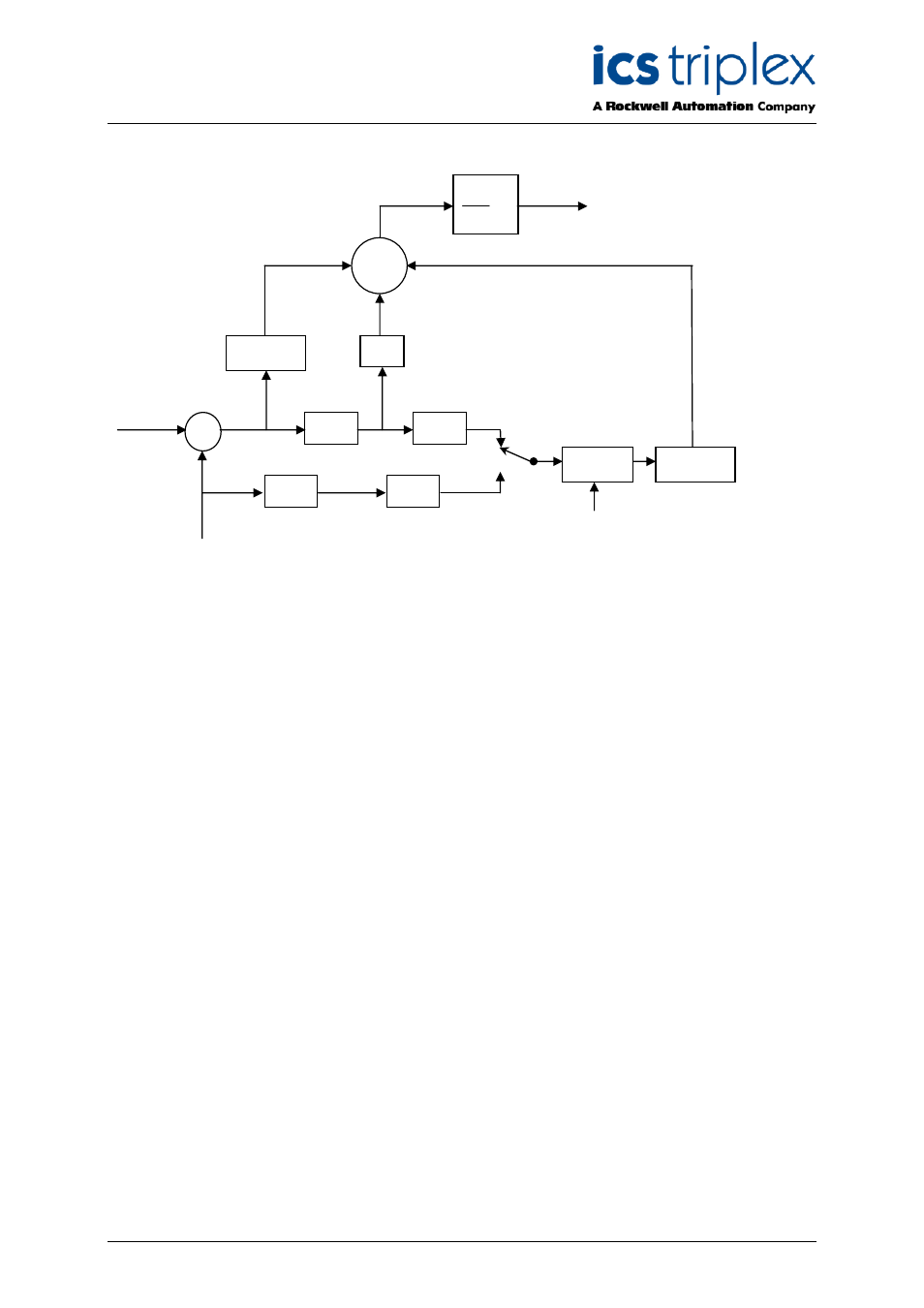
The figure below gives an overview of the IPID function:
Figure 2 IPID Function
The calculation is performed one step into the derivative and is then integrated back for the real output.
At entry the error
S
is calculated as the difference between the set-point (SP) and the process variable
(PV). This error value is used directly for the integral action, after one differentiation for the proportional
action, and after two differentiations for the derivative action. The derivative action can be switched
using D
ERR
to either use the second differential of error or PV, with a filter.
INC
STOP
prevents the output X
OUT
increasing when TRUE. When this input is TRUE and the IPID is in
AUTO mode, the output is compared with the previous output and only values less than or equal to the
previous output will be returned and LIMIT
HI
will be set to TRUE. The delta outputs D
QP
, D
QI
, D
QD
and
D
XOUT
continue to update. Similarly, when DEC
STOP
is TRUE Xout will only return values greater than or
equal to the previous value, and LIMIT
LO
will be set to TRUE.
In manual mode (AUTO = False), the output (Xout) follows the input XO. Bumpless transfer to auto is
inherent because only the change in output is calculated. If set-point tracking is required then the
MANTRK function should be used in conjunction with the IPID function.
The IPID function provides high and low limits (Xmax and Xmin) to be specified. If the PID output
would have exceeded the specified high or low limits, the corresponding limit output (LIMIT
HI
and
LIMIT
LO
) is generated. Note that the limit outputs are updated on each iteration of the IPID function.
The maximum and minimum limits on Xout apply in both auto and manual modes. There is no need for
anti-windup protection because there is no stored integral term.
On the first application scan, the PID function will clear its registers and will not calculate an output.
If Xmax < Xmin, the function assumes that the values have been reversed and “swaps” the values. On
each execution of the IPID function with reversed parameters the ‘reversed’ error count will be
incremented. If an overflow condition occurs during the execution of the PID function the output Xout
will be set to Xmin in auto mode or XO in manual mode, and the stored registers are cleared.
SP
PV
+
-
S
(Error)
d/dt
d/dt
d
S
d
2
S
d/dt
dPV
d/dt
d
2
PV
D
ERR
1 - e
-t/W
Tdf
W
K
P
T
D
/T
S
Derivative
K
p
Proportional
K
p
T
S
/T
I
Integral
X
+
+
+
Y
1
T
X
OUT
Filter
Switch