Proportional pid function, Low value select, Trusted – Rockwell Automation T8019 Trusted Process Control Algorithm Software Package User Manual
Page 15: Process control algorithms t8019
Trusted
TM
Process Control Algorithms T8019
Issue 8 Sep 07
PD-T8019
15
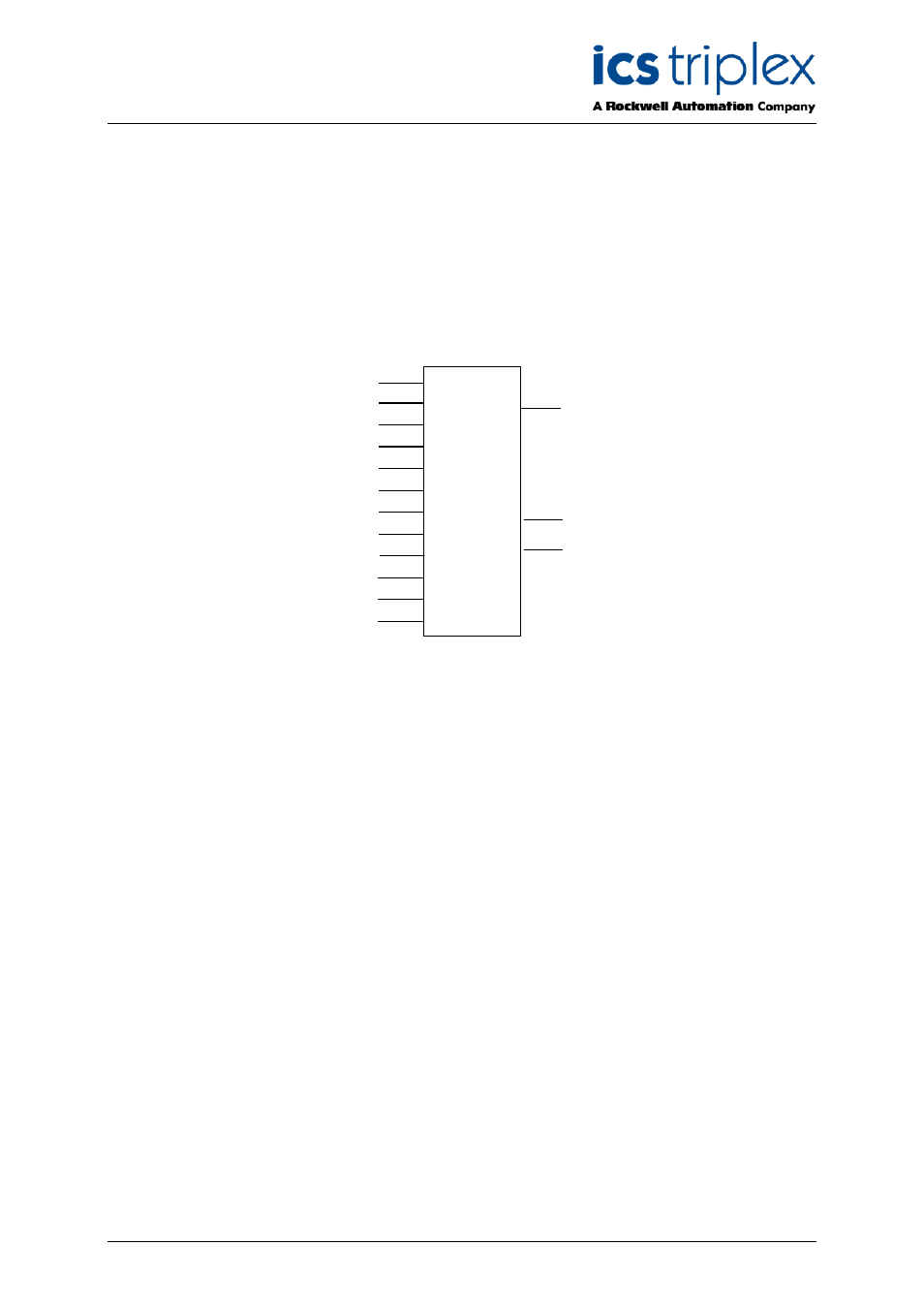
2.6. Proportional PID Function
NOTE
The PID_II function block has been superseded by the IPID function block, which provides incremental
PID and enhanced functions. All new strategies should use IPID. PID_II is retained for compatibility,
but may be replaced in an application by IPID if desired.
A PID is a process regulator. Using the feedback concept, an output is regulated according to the
difference between its current value (PV) and its required value (SP).
PID-II
PV
X
OUT
SP
Auto
XO
Kp
Ti
Td
Ts
X
MAX
X
MIN
LIMIT
HI
LIMIT
LO
INC
STOP
DEC
STOP
Auto is the auto/manual mode select (type BOOLEAN). When set to TRUE the PID calculation is in
auto mode. XO is the manual set-point and is type REAL. Kp is the proportional constant (type
REAL). Ti is the integral time constant (type TIMER). If this is set to zero the function provides only the
P and D terms. Td is the derivative time constant (type TIMER). Ts is the sample time (type TIMER).
If the specified sample time is less than the application program scan time, then the effective Ts will be
the greater of the application scan time or PID function execution interval.