Power wiring requirements – Rockwell Automation 2097-Vxxxx Kinetix 300 EtherNet/IP Indexing Servo Drive Installation Instructions User Manual
Page 12
12 Kinetix 300 EtherNet/IP Indexing Servo Drive
Rockwell Automation Publication 2097-IN001I-EN-P - July 2013
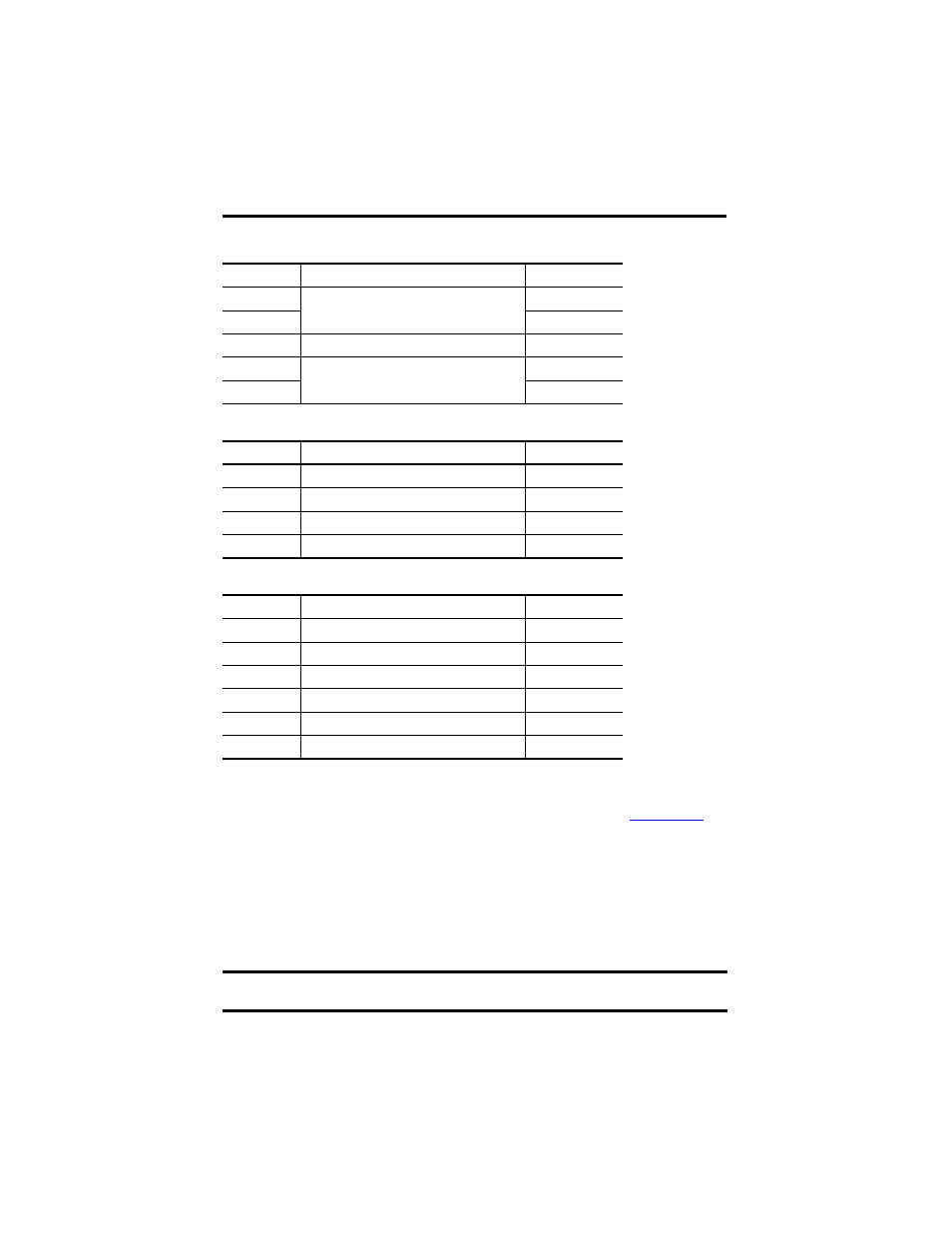
Shunt Resistor and DC Bus (BC) Pinout
Motor Power (MP) Pinout
Safe Torque Off (STO) Pinout
The Kinetix 300 drives ship with the safe torque-off circuitry enabled. Connect the safe
torque-off inputs to a safety circuit or install motion-allowed jumpers to obtain motion. Refer to
the Kinetix 300 EtherNet/IP Indexing Servo Drives User Manual, publication
, for
details.
Power Wiring Requirements
Wire must be copper with 75 °C (167 °F) minimum rating. Phasing of main AC power is
arbitrary and earth-ground connection is required for safe and proper operation.
BC Designator
Description
Signal
+
Positive DC bus and shunt resistor
+
+
+
SH
Shunt resistor
SH
–
Negative DC bus
–
–
–
MP Designator
Description
Signal
PE
Protective earth (ground)
PE
W
Motor power out
W
V
Motor power out
V
U
Motor power out
U
STO Pin
Description
Signal
1
+24V DC output from the drive
+24V DC Control
2
+24V DC output common
Control COM
3
Safety status
Safety Status
4
Safety input 1 (+24V DC to enable)
Safety Input 1
5
Safety common
Safety COM
6
Safety input 2 (+24V DC to enable)
Safety Input 2
IMPORTANT
The National Electrical Code and local electrical codes take precedence over the values and
methods provided.