Default input and output (i/o) assembly formats – Rockwell Automation 284G ArmorStart - Getting Started User Manual
Page 13
Publication 284G-QS001A-EN-P - December 2008
13
Using Automap Feature with Default Input and Output (I/O) Assemblies
The Automap feature available in all Rockwell Automation scanners will
automatically map the information as shown below. If manual mapping is
required, the information below can be used to map a device based on the
default configuration.
Table 3
Default I/O Messaging Data
Default Input and Output (I/O) Assembly Formats
The I/O assembly formats for the ArmorStart
are identified by the value in
Parameter 11 (Consumed IO Assy.) and Parameter 12 (Produced IO Assy.).
These values determine the amount and arrangement of the information
communicated to the master scanner. The tables below identify the default
information produced and consumed by Bulletin 284G devices. For
additional formats and advance configurations please reference the user
manual:
Defaults for Bulletin 284G Distributed Motor Controllers
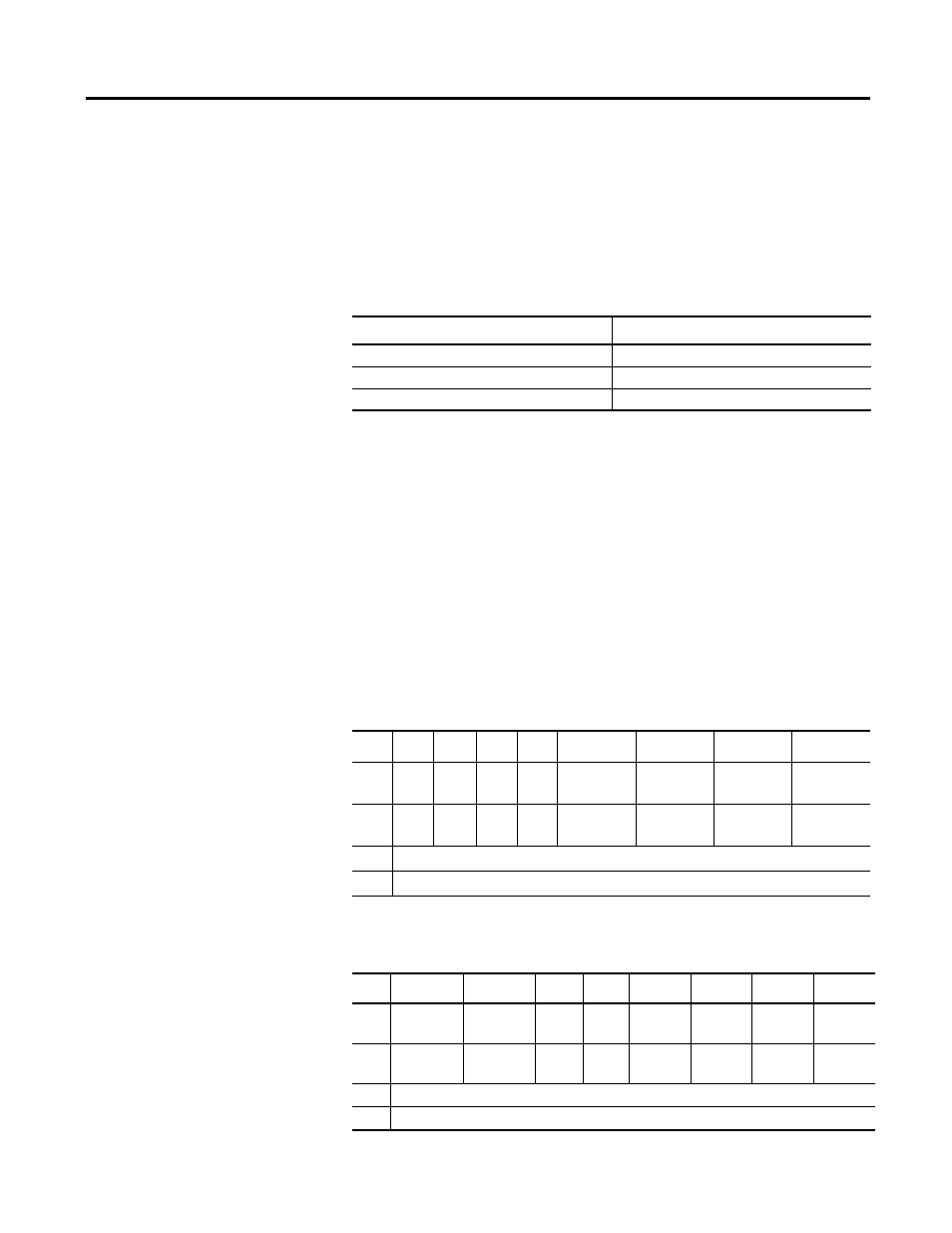
Table 4
Instance 164 — Default Consumed Inverter Type Distributed Starter
(4 bytes)
Table 5
Instance 165 — Default Produced Inverter Type Distributed Starter
(4 bytes)
➊ Refers to control brake contactor status..
Default
Message type
Polled
Consumed data size
4 byte (Rx)
Produced data size
4 bytes (Tx)
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
Not
Used
Not
Used
Not
Used
Jog
Rev
Jog Fwd
Fault Reset
Run Rev
Run Fwd
1
Drive
In 4
Drive
In 3
Drive
In 2
Drive
In 1
Decel Rate 2
Enable
Decel Rate 1
Enable
Accel Rate 2
Enable
Accel Rate 1
Enable
2
Comm Frequency Command (Low) (xxx.x Hz)
3
Comm Frequency Command (High) (xxx.x Hz)
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
At
Reference
140M On
Net Ctl
Status
Ready
Running
Rev
Running
Fwd
Warning
Tripped
1
Reserved
Contactor 1
➊
Input
5
Input
4
Input 3
Input 2
Input 1
Input 0
2
Output Frequency (Low) (xxx.x Hz)
3
Output Frequency (High) (xxx.x Hz)