Function block library lenzeelectricalshaft.lib, L _ r e f, T o n – Lenze DDS Global Drive PLC Developer Studio User Manual
Page 35: 4 output of status signals
Function block library LenzeElectricalShaft.lib
Special functions
2.1.4
Homing function (L_REF)
2−25
L
LenzeElectricalShaft.lib EN 1.2
Example
The motor should make a 10−turn (left/ccw rotation) relative positioning movement, and then stop.
Settings:
·
byHomingMode = 20
·
L_REF.RefOffset = 0
After operation of DIGIN_bIn1_b =TRUE, the motor rotates for 10 turns in a left/ccw direction.
·
If the value L_REF.dnActPos_p is positive, the motor rotates left/ccw, if it is negative, the
motor rotates in a cw direction!
·
If a reference point offset is also defined then with a
– positive offset, the relative position = L_REF.dnActPosIn_p − L_REF.RefOffse
– negative offset, the relative position = L_REF.dnActPosIn_p + L_REF.RefOffset
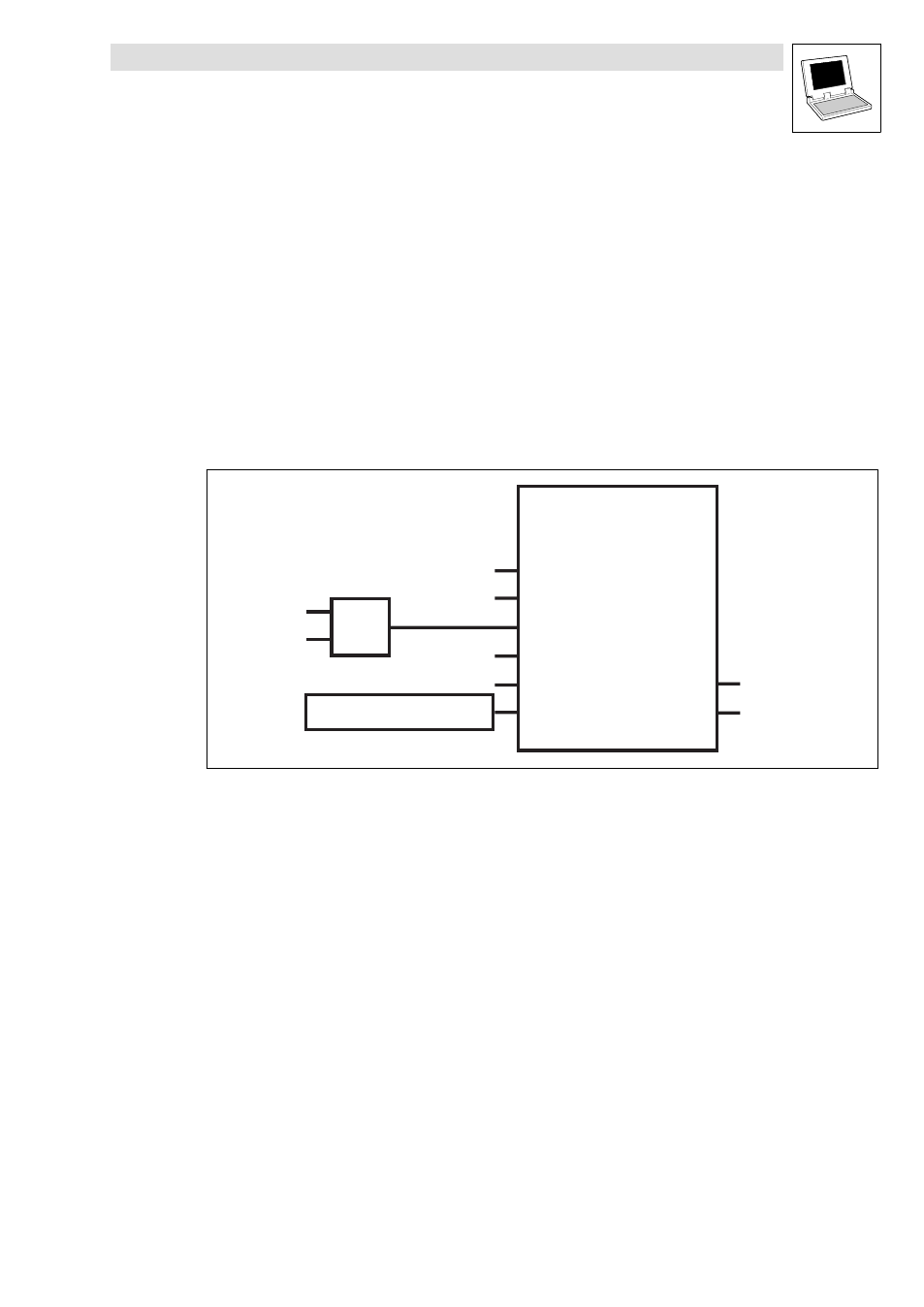
L _ R E F
d n A c t P o s I n _ p
b P o s L o a d _ b
b O n _ b
n N A c t _ v
n N I n _ a
d n P o s I n _ p
n N S e t _ a
d n P o s O u t _ p
6 5 5 3 6 0
D I G I N _ b I n 1 _ b
M C T R L _ n N A c t _ v
0
M C T R L _ n N S e t _ a
M C T R L _ d n P o s S e t _ p
T O N
D I G I N _ b I n 1 _ b
t # 5 0 0 m s
S o l l w e r t f ü r W i n k e l r e g l e r n a c h
B e e n d i g u n g d e r P o s i t i o n n i e r u n g
Abb. 2−19
Example of relative positioning
(Legend: Sollwert für Winkelregler nach ..... = Setpoint for phase−angle controller at the end of positioning)
2.1.4.4
Output of status signals
·
With bBusy_b = TRUE, the homing function is active:
– The profile generator is connected to the outputs dnPosOut_p and nNSet_a
·
With bBusy_b = FALSE, the homing function is not active (or finished):
– The inputs dnPosIn_p and nNIn_a are connected through to the outputs dnPosOut_p
and nNSet_a
·
With bRefOk_b = TRUE, the homing run has been ended successfully:
– Homing is completed if the setpoint of the profile generator has reached the home position.
– Any possible contouring error is transmitted to the FB L_DFSET and compensated unless
the drive is operating at the torque limit.
·
With bRefOk_b = FALSE:
– Homing is currently being carried out or
– the reference point is no longer known, e.g. due to interference, or
– homing was interrupted.