3 gearing compensation (l_gearcomp), Gearing compensation (l_gearcomp), Function block library lenzeelectricalshaft.lib – Lenze DDS Global Drive PLC Developer Studio User Manual
Page 26: Parameter codes of the instances
Function block library LenzeElectricalShaft.lib
Special functions
2.1.3
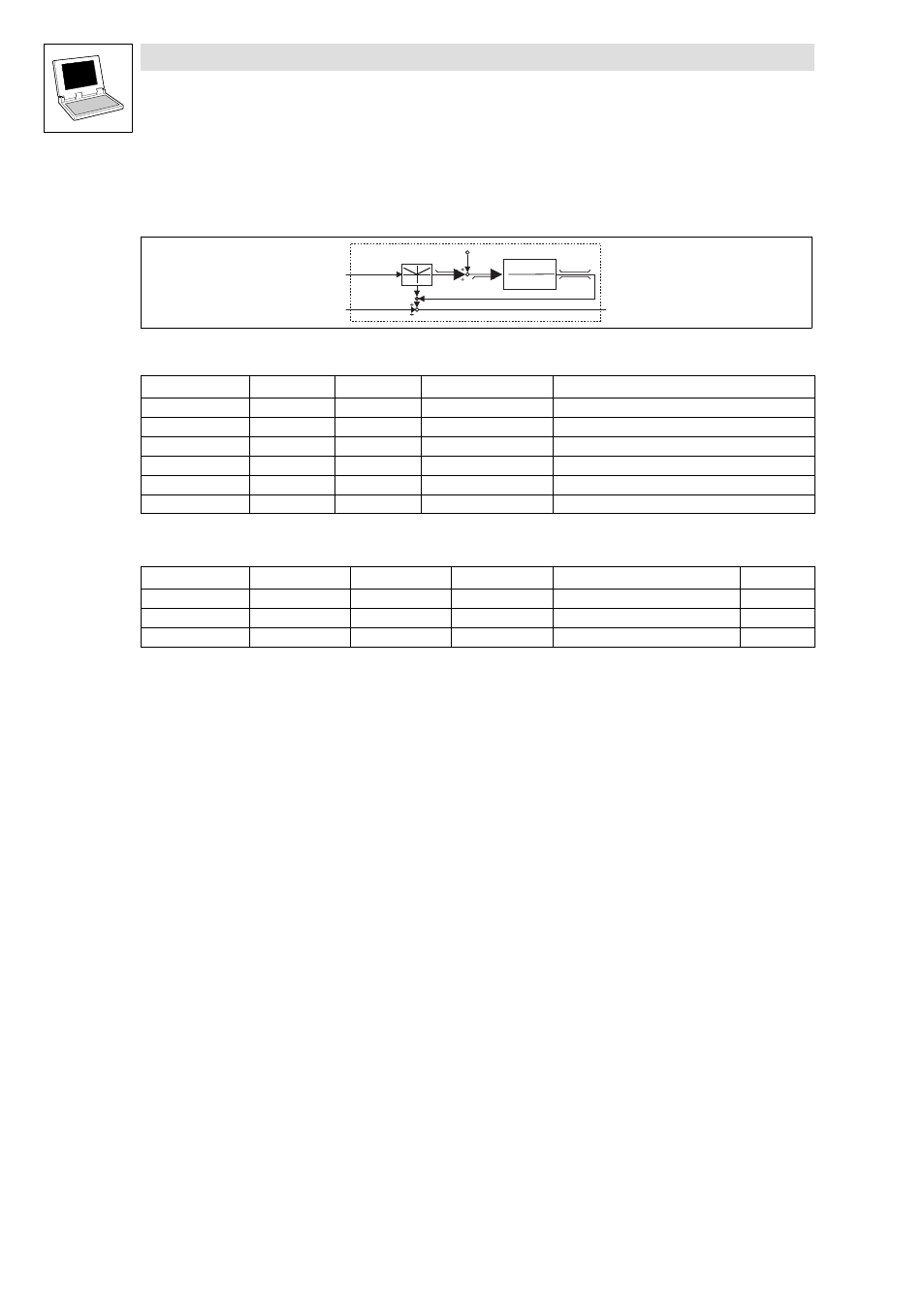
Gearing compensation (L_GEARCOMP)
2−16
L
LenzeElectricalShaft.lib EN 1.2
2.1.3
Gearing compensation (L_GEARCOMP)
This FB compensates for elasticity in the drive chain.
L _ G E A R C O M P
d n O u t _ p
V o r z e i c h e n
n T o r q u e _ a
2
1 4
0
n O f f s e t
n N u m e r a t o r
n D e n o m i n a t o r
2
1 5
- 1
- 2
1 5
+ 1
d n P h i l n _ p
Abb. 2−9
Gearing compensation (L_GEARCOMP)
VariableName
DataType
SignalType
VariableType
Note
nTorque_a
Integer
analog
VAR_INPUT
Input value
dnPhiIn_p
Double Integer
position
VAR_INPUT
Input value
dnOut_p
Double Integer
position
VAR_OUTPUT
Initial value
nOffset
Integer
−
VAR CONSTANT RETAIN
Offset
nNumerator
Integer
−
VAR CONSTANT RETAIN
Numerator, dynamic switch−off at nNumerator = 0
nDenominator
Integer
−
VAR CONSTANT RETAIN
Denominator
Parameter codes of the instances
VariableName
L_GEARCOMP1
SettingRange
Lenze
nOffset
C1260
−16383 ... 16383
0
nNumerator
C1261
−32767 ... 32767
1
nDenominator
C1262
1 ... 32767
1
Functional sequence
1. The signal at nTorque is divided into the absolute value and the sign.
2. The value is converted (with nNumerator, nDenominator, nOffset ).
3. The result is evaluated with the sign and added to the signal at dnPhiIn_p